




这是一份基于《第一军事学院·第701垂直战术班》世界观,模仿欧姆社(Ohmsha)“漫画学”系列风格的科普漫画企划书。
本企划将通过叶子(算盘)与苏菲博士(魔女)的互动,讲解全息光学与波前整形中的经典算法——Gerchberg-Saxton (GS) 算法。
漫画企划书:用算法重构光影——GS 算法篇
1. 基础规格
- 漫画标题:第 701 班的补习课:全息投影与丢失的相位
- 出场角色:
- 学习内容:Gerchberg-Saxton (GS) 算法(迭代相位恢复算法)。
- 画面页数:9 页。
- 排版方式:竖排(适合手机滑屏阅读,每一页比例 3:4)。
- Q 版使用:否(严格遵循设定集工业现实主义风格,但图解部分允许使用抽象示意图)。
- 语言:简体中文。
- 页码显示:显示(右下角)。
- 色彩:彩色(强调全息投影的蓝/绿光与实验室的暗调对比)。
2. 剧情大纲
叶子试图为机甲改装一套高精度的“全息诱饵系统”,但投影出来的图像总是模糊不清,充满散斑。物理系天才苏菲博士现身,指出叶子只关注了光的“强度”而忽略了“相位”,并传授了一种通过“反复横跳”来找回相位的经典算法——GS 算法。
3. 分镜脚本设计
Page 1: 模糊的幻影
场景:地下二层实验室“垃圾站”3。昏暗的工业环境,充满了电子仪器的幽光。
氛围:焦躁、困惑。
-
Panel 1 (顶端):
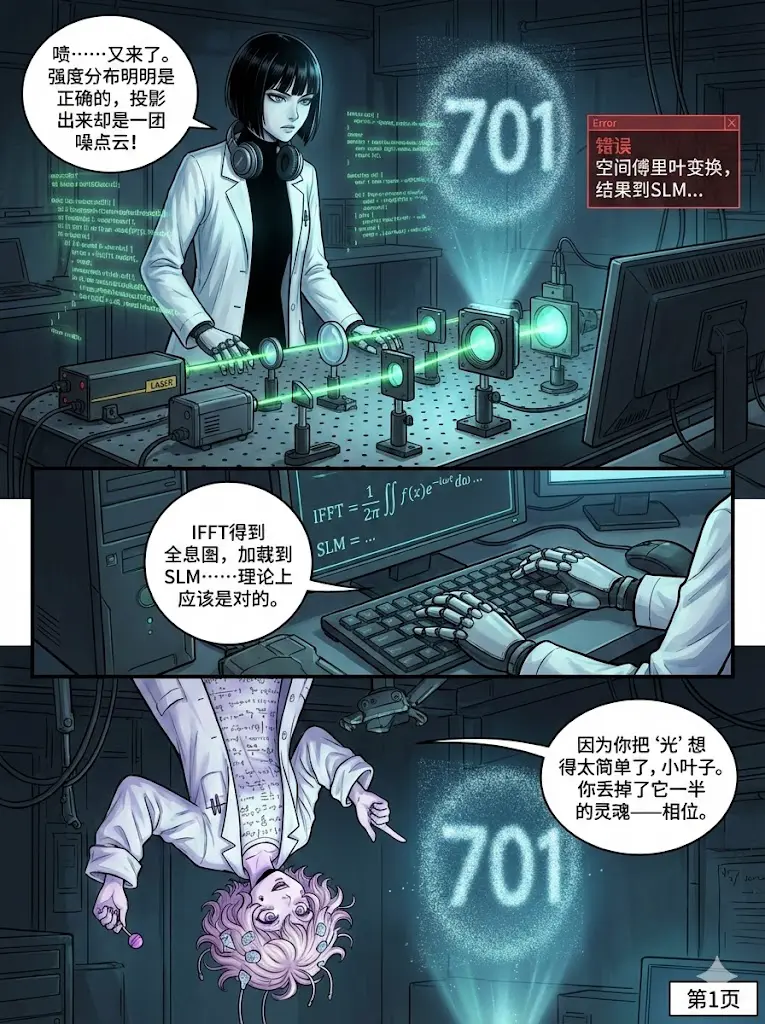
- 画面: 叶子坐在工作台前,带着 AR 护目镜,周围悬浮着绿色的代码瀑布流4。面前的全息投影仪正在投射一个 701 班徽章的 3D 图像。
- 细节: 图像边缘模糊,充满了噪点和散斑。
- 台词 (叶子): “切……又是这样。光强分布明明已经按照目标图像计算了,为什么成像还是像一团散开的云?”
-
Panel 2 (中间):
- 画面: 叶子的手特写(指尖有金属触点)5 正在敲击虚拟键盘。屏幕显示傅里叶变换的公式,但报错红框闪烁。
- 台词 (叶子): “逆傅里叶变换(IFFT)得到全息图,加载到空间光调制器(SLM)上……理论上没错啊。”
-
Panel 3 (底端):
- 画面: 苏菲博士倒挂着(或者飘着)出现在叶子身后,头发乱糟糟的,嘴里含着棒棒糖6。
- 台词 (苏菲): “因为你把‘光’想得太简单了,小叶子。你丢掉了一半的灵魂——相位 (Phase)。”
Page 2: 看得见与看不见的
学习点:光的复振幅描述,强度与相位的关系。
-
Panel 1:
- 画面: 苏菲落地,甚至都没穿好鞋。她随手在空中画出一个正弦波。
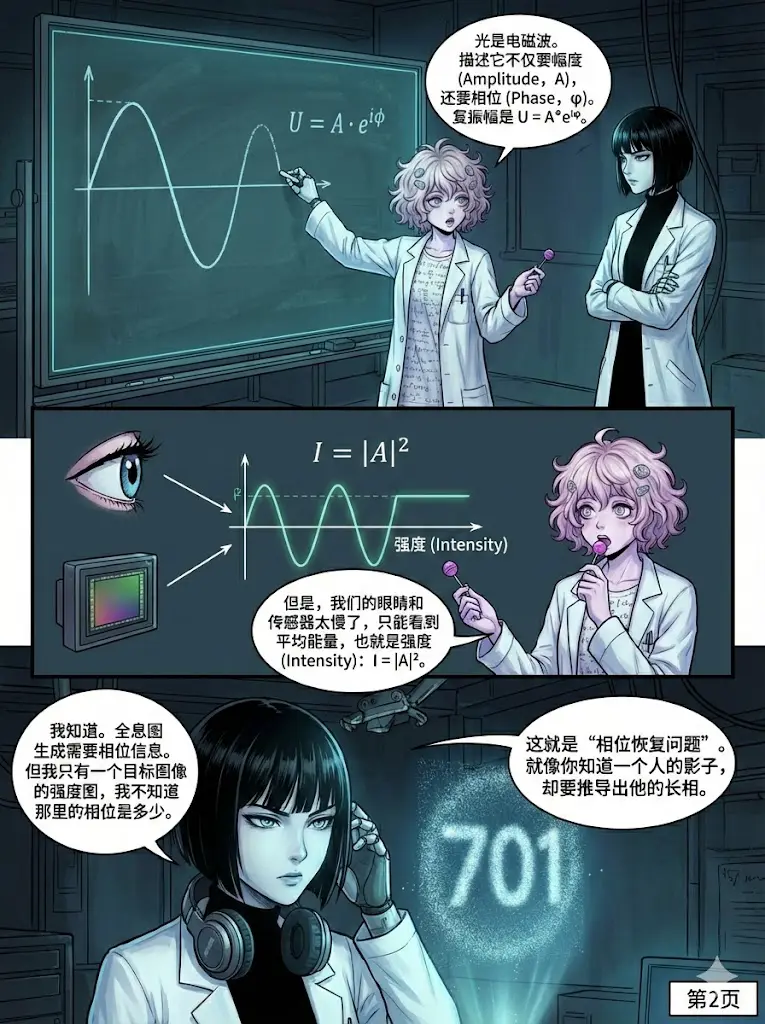
- 台词 (苏菲): “光是电磁波。描述它不仅要幅度 (Amplitude, ),还要相位 (Phase, )。复振幅是 。”
-
Panel 2:
- 画面: 示意图。左边是人眼/相机,右边是波形。
- 台词 (苏菲): “但是,我们的眼睛和传感器太慢了,只能看到平均能量,也就是强度 (Intensity):。”
-
Panel 3:
- 画面: 叶子推了一下看不见的眼镜,眼神冷冽。
- 台词 (叶子): “我知道。全息图生成需要相位信息。但我只有一个目标图像的强度图 (Target Intensity),我不知道那里的相位是多少。”
- 台词 (苏菲): “这就是‘相位恢复问题’。就像你知道一个人的影子,却要推导出他的长相。”
Page 3: 傅里叶变换的魔法
学习点:光在透镜后焦面的传播等效于傅里叶变换。
-
Panel 1:
- 画面: 苏菲咬碎棒棒糖,指着实验台上的透镜。背景切换为黑板风格的图解7。
- 台词 (苏菲): “还记得我们在物理课上讲的吗?光穿过透镜,在焦平面上的分布,恰好是源平面的傅里叶变换 (Fourier Transform)。”
-
Panel 2:
- 图解:
- 平面 A (源平面/SLM): 激光束。
- 中间: 透镜。
- 平面 B (目标平面/屏幕): 成像。
- 公式标注:
- 台词 (苏菲): “源平面是空间域,目标平面是频域。它们通过 和 紧密相连。”
- 图解:
-
Panel 3:
- 画面: 叶子看着图解,眉头紧锁。
- 台词 (叶子): “所以,我要找出一张相位图,让它经过 变换后,强度刚好等于我的目标图像?”
Page 4: 只要来回跑就能找到答案?
学习点:GS 算法的核心思想——迭代与约束。
-
Panel 1:
- 画面: 苏菲露出狡黠的笑容(魔女状态)。
- 台词 (苏菲): “既然算不出来,那就‘骗’出来。这就是 Gerchberg-Saxton 算法。如果你不知道答案,就先猜一个,然后让光在两个平面间来回跑。”
-
Panel 2:
- 画面: 一个巨大的循环流程图出现在两人中间。
- 流程图文字: 源平面 (Source) 傅里叶变换 目标平面 (Target)。
-
Panel 3:
- 画面: 叶子若有所思。
- 台词 (叶子): “迭代算法?通过施加约束来收敛?”
- 台词 (苏菲): “没错!我们开始第一步:瞎猜。”
Page 5: Step 1 & 2 - 前向传播与强度替换
学习点:初始相位猜测,频域的振幅约束。
-
Panel 1 (Step 1):
- 画面: 叶子操作终端。输入端是高斯光束(激光)。
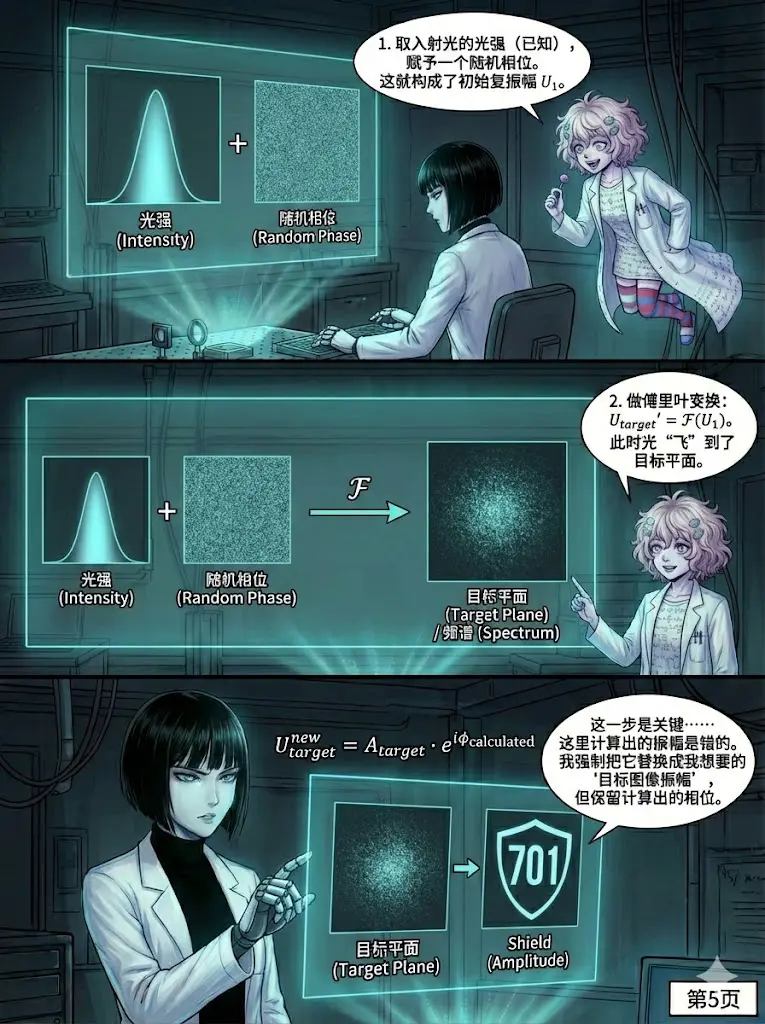
- 台词 (旁白/苏菲): “1. 取入射光的光强(已知),赋予一个随机相位。这就构成了初始复振幅 。”
-
Panel 2:
- 画面: 箭头指向右边。数学符号 发光。
- 台词 (旁白): “2. 做傅里叶变换:。此时光‘飞’到了目标平面。”
-
Panel 3 (Step 2 - 关键):
- 画面: 叶子的手像手术刀一样切掉了波形的振幅8。
- 台词 (叶子): “这一步是关键……这里计算出的振幅是错的。我强制把它替换成我想要的‘目标图像振幅’,但保留计算出的相位。”
- 公式:
Page 6: Step 3 & 4 - 逆向传播与源平面约束
学习点:逆傅里叶变换,空间域的振幅约束。
-
Panel 1:
- 画面: 箭头指回左边。数学符号 发光。
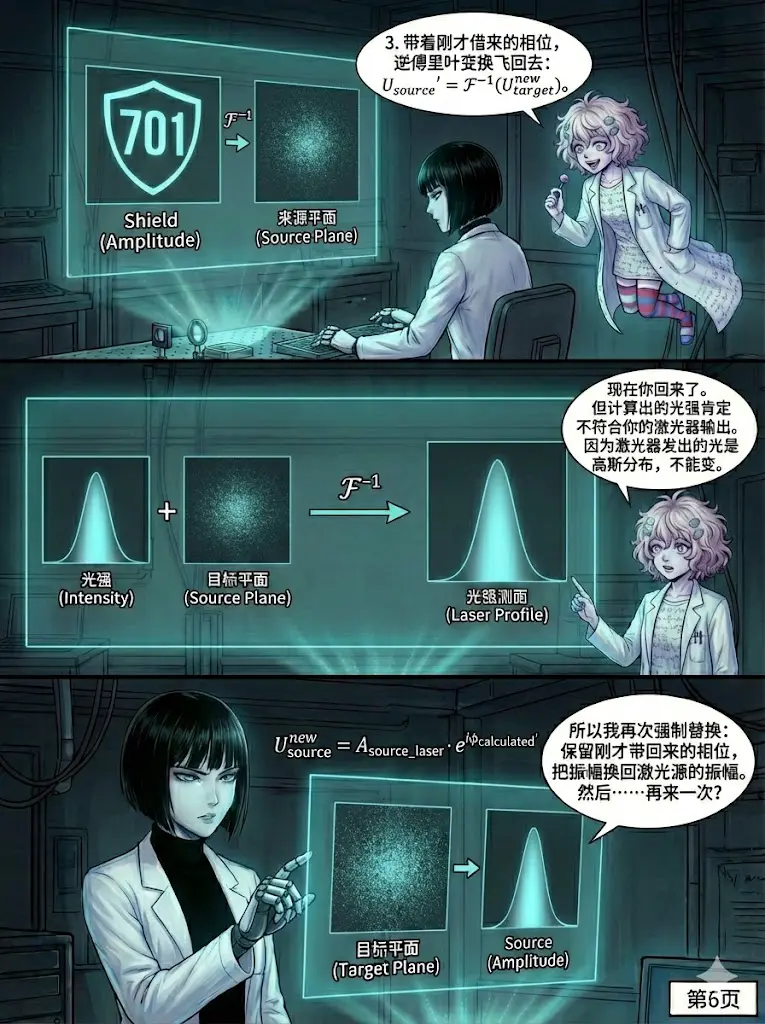
- 台词 (旁白): “3. 带着刚才借来的相位,逆傅里叶变换飞回去:。”
-
Panel 2 (Step 4):
- 画面: 回到源平面。苏菲指着激光器。
- 台词 (苏菲): “现在你回来了。但计算出的光强肯定不符合你的激光器输出。因为激光器发出的光是高斯分布,不能变。”
-
Panel 3:
- 画面: 再次进行“替换”操作。
- 台词 (叶子): “所以我再次强制替换:保留刚才带回来的相位,把振幅换回激光源的振幅。然后……再来一次?”
Page 7: 误差的收敛
学习点:迭代过程中的误差下降可视化。
-
Panel 1:
- 画面: 画面分割为九宫格,显示迭代次数 时的图像变化。
- 视觉效果: 从一开始的一团噪点(),逐渐浮现出轮廓(),最后变成清晰锐利的 701 班徽章()。
-
Panel 2:
- 画面: 叶子的瞳孔中倒映着均方误差 (MSE) 随迭代次数迅速下降的曲线图9。
- 台词 (叶子): “误差在指数级下降……相位分布正在自我修正,以此来同时满足两个平面的振幅约束。”
-
Panel 3:
- 台词 (苏菲): “虽然相位你是看不见的,但它像一只无形的手,把光子推到了它们该去的地方,形成了你看到的图像。”
Page 8: 真理之眼开启
场景:算法部署完成,全息投影启动。
-
Panel 1:
- 画面: 叶子按下“Execute”键。特写:空间光调制器 (SLM) 的液晶单元翻转,加载了计算出的全息相位图(看起来像一堆杂乱的黑白纹理)。
-
Panel 2:
- 画面: 高光时刻。实验室被清晰、锐利、泛着幽蓝光芒的全息徽章照亮。
- 视觉特效: 叶子开启“真理之眼”视角,看到的不再是图像,而是空气中密密麻麻的波前矢量箭头 被精确整形的轨迹10。
-
Panel 3:
- 台词 (叶子): “全息诱饵系统上线。信噪比提升 400%。这样即使是 101 班的雷达也会被骗过。”
Page 9: 课后作业
场景:轻松的结尾,引出后续思考。
-
Panel 1:
- 画面: 雷锤 (Ray) 刚好走进实验室,手里拎着巨型扳手,一脸懵逼地看着空中的全息影像11。
- 台词 (雷锤): “喂,你们搞这花里胡哨的有什么用?能砸死人吗?”
-
Panel 2:
- 画面: 苏菲博士又拆了一根棒棒糖,飘到半空。
- 台词 (苏菲): “当然可以,傻大个。GS 算法不仅能造假象,还能做‘光束整形’。把激光能量集中成一把刀的形状,这就叫‘激光加工’。”
-
Panel 3:
- 画面: 苏菲看向叶子(打破第四面墙)。
- 台词 (苏菲): “不过 GS 算法容易陷入局部最优解哦。下次我们来讲讲怎么用‘模拟退火’或者‘加权’来优化它。今天的作业是:写一个 Python 版的 GS 求解器!”
- 页脚:
- 下一步: 关注下一话《如何跳出局部最优:模拟退火算法》。
- 页码: 09
4. 视觉与设计要点
- 线框 UI (Wireframe UI): 当讲解算法步骤时(P5-P6),使用漫画设定的“真理之眼”风格。将复杂的物理过程抽象为简洁的线框图示,避免大段文字堆砌。
- 光影对比:
- 苏菲的部分:充满不确定性,线条可以是波动的、柔和的(量子/概率云风格)。
- 叶子的部分:严谨、锐利、像素化(数字信号处理风格)。
- 最终成像:必须画出那种“由激光干涉形成”的独特颗粒感 (Laser Speckle),体现硬科幻的真实性。
- 色彩逻辑:
- 源平面 (Source): 红色(代表激光)。
- 目标平面 (Target): 绿色或蓝色(代表全息像)。
- 相位图:灰度图(0-255 代表 )。
5. 附录:涉及公式
为了保证科普的专业性,漫画背景或屏幕上应隐约出现以下核心公式:
-
正向传播:
-
目标约束:
-
逆向传播:
-
源约束: