第二部分:线路之眼——流与向量场
第3章:被拉伸的地图——高度近视与移动的坐标系
“并非所有的红色都是警告,有时候,那只是地图过时了。”
3.1 引言:Dr. X 的“红色恐慌”
Dr. X 遇到了一位棘手的病人:一位 25 岁的年轻程序员,近视 900 度,眼轴长达 27.5mm。
当 Dr. X 拿到 OCT 报告时,心里“咯噔”了一下。报告上的视神经纤维层(RNFL)分析图——那个著名的“双峰图”(TSNIT 曲线)——在上方和下方区域显示出一片刺眼的红色。
机器的诊断很冷酷:视神经萎缩,疑似青光眼。
如果这发生在一位 60 岁的老人身上,Dr. X 会毫不犹豫地开始降眼压治疗。但眼前这位年轻人视野完全正常,视盘颜色红润,除了近视眼底常见的“豹纹状”改变外,看不到任何青光眼的视神经盘沿丢失。
Dr. X 陷入了两难:
- 相信机器? 也许是极早期的青光眼,不治会瞎。
- 相信直觉? 也许这只是高度近视造成的假象,治了就是过度医疗。
这在临床上被称为 “红色病” (Red Disease)。这并非一种生物学上的疾病,而是一种几何学上的误会。
本章,我们要拆开 OCT 机器的黑匣子,看看它内置的“地图”是如何在高度近视的眼球中失效的,并教你如何用数学修正它。
3.2 机器的逻辑:Jansonius 地图
OCT 机器凭什么判断哪里“变薄”了?因为它脑子里装了一张“标准地图”。这张地图大都基于同一个著名的数学模型——Jansonius 模型。
在第1章我们说过“地图不是疆域”,而在视网膜上,Jansonius 教授做了一件很聪明的事:他把弯曲的视网膜强行“铺平”了。
3.2.1 强行拉直的抛物线
如果你看过眼底照,会发现颞侧的神经纤维是弯弯曲曲的,像两道拱门避开了黄斑。但在数学处理上,处理曲线很麻烦。
Jansonius 引入了一个 “修正极坐标系”。想象一下,你把眼底照片印在一张橡胶膜上,然后抓住黄斑颞侧那个弯曲的中缝,用力把它拉直。
在这个坐标系里:
- 原本弯曲的纤维,变成了从视盘发出的直线(辐射状)。
- 数学公式:。
这就像把弯曲的地铁线路图画成直的,为了方便管理。对大多数正视眼(眼轴 24mm 左右)来说,这个近似非常完美。机器在“12点钟”和“6点钟”方向寻找最厚的神经纤维,通常都能找到。
3.2.2 那个神奇的 Tanh 开关
除了拉直,神经纤维还面临一个选择:是走上方绕过黄斑,还是走下方?
Jansonius 模型用了一个双曲正切函数 (Tanh) 来描述这种分流。你可以把它想象成一个“软开关”:
- 在某个角度之前,纤维都听话地走上方。
- 在某个临界点(大约 ),纤维突然收到信号,全部转向去走鼻侧。
这构成了标准地图的骨架。但问题是,这副骨架是死板的。
3.3 当疆域被拉伸:高度近视的几何灾难
现在,让我们看看那位年轻程序员的眼睛。
他的眼球不是球体,而是一个被拉长的椭球体(橄榄球)。眼轴从 24mm 变成了 27.5mm。这种拉伸不是均匀的,眼球后极部 (Posterior Pole) 被撑得最大。
3.3.1 车站移动了,车还在原地等
想象一下,如果把上面那个“橡胶膜地图”用力向左右拉伸,会发生什么?
- 物理位移:原本位于视盘正上方(12点钟方向)的神经纤维束,会被物理力量拖拽向颞侧(耳朵方向)。
- 角度偏移:原本在 的山峰,现在可能移到了 。
- 拥挤效应:上下方的纤维束向中间靠拢,夹角变小了。
这就是 “颞侧偏移” (Temporal Shift)。
3.3.2 误诊的诞生
回到 OCT 机器的视角。它是一个只懂查表的傻瓜。
它拿着“标准地图”,依然固执地去 12点钟 方向找神经纤维。
但因为高度近视的拉伸,那里的神经纤维已经搬家去了 10点钟 方向。
机器在 12 点钟摸了个空,发现厚度变薄了,立刻报警:“红色警报!神经萎缩!”
而在 10 点钟方向,机器可能会测得异常的厚度,但它往往选择忽略,或者以为是别的变异。
结论: 病人没有病,是机器在错误的地方寻找正确的东西。
3.4 修正坐标系:给地图加个“近视滑块”
既然知道了原因,作为“空间的架构师”,Dr. X 不应该扔掉 OCT,而应该修正它。
我们不需要极其复杂的物理模型,只需要在 Jansonius 的公式里加一个 “眼轴修正项”。
我们引入一个参数 (漂移角),它与眼轴长度 (AL) 成正比。根据临床大数据(Yamashita 等人的研究),眼轴每增长 1mm,神经纤维峰值大约向颞侧移动 。
修正后的逻辑很简单:
对于那位眼轴 27.5mm 的患者,修正量是:
这意味着,Dr. X 在看 OCT 时,要把脑子里的刻度盘向颞侧旋转 。
3.5 计算眼科学实战:Wolfram 测谎仪
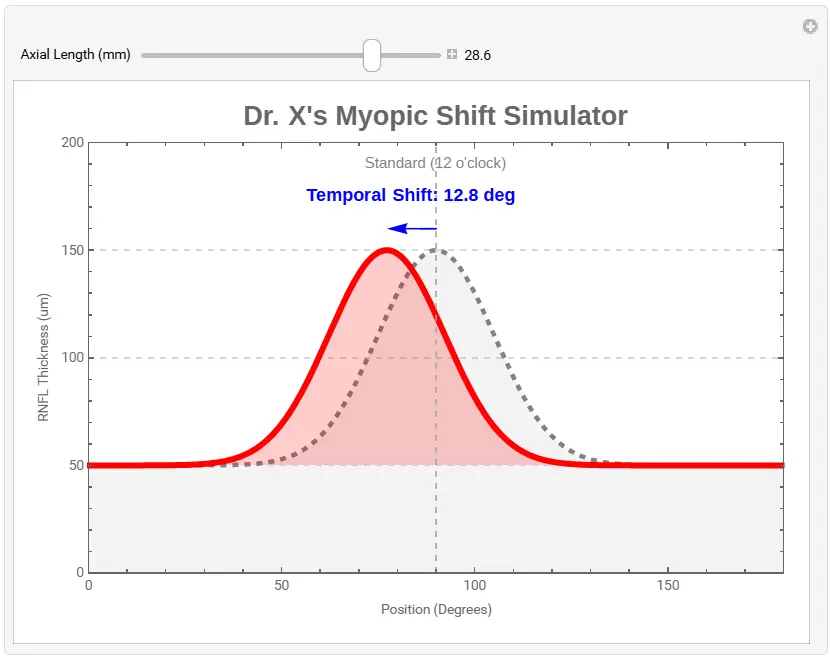
光说不练假把式。我们用 Wolfram Language 写一个小程序,模拟这种“颞侧偏移”。Dr. X 可以输入病人的眼轴,直观地看到神经纤维是如何“搬家”的。
ClearAll["Global`*"]
(* 第3章 V3.0:基于连续函数的稳健型模拟器 *)
(* 核心改进:弃用 ListLinePlot,改用 Plot 直接绘制数学函数,杜绝数据生成环节的 Bug *)
Manipulate[
Module[{gaussianFunc, currentShift, currentPeak, isRisk},
(* 1. 定义数学模型:连续的高斯函数 *)
(* 这种写法比 Table 生成列表更稳定,不会因为计算延迟而丢帧 *)
gaussianFunc[t_, peak_] := 100 * Exp[-0.5 * ((t - peak)/15.0)^2] + 50;
(* 2. 实时计算位置 *)
currentShift = If[AL > 23.5, 2.5 * (AL - 23.5), 0];
currentPeak = 90 - currentShift;
isRisk = (AL > 26.0); (* 风险阈值判断 *)
(* 3. 绘图输出 *)
Show[
(* 图层1:标准正视眼 (灰色虚线) *)
Plot[gaussianFunc[x, 90], {x, 0, 180},
PlotStyle -> {Thickness[0.006], Dashed, Gray},
Filling -> Axis, FillingStyle -> Opacity[0.1, Gray],
PlotRange -> {{0, 180}, {0, 200}}
],
(* 图层2:患者实测 (动态实线) *)
(* 使用 Plot 直接渲染函数,确保曲线永远存在 *)
Plot[gaussianFunc[x, currentPeak], {x, 0, 180},
PlotStyle -> {Thickness[0.008], If[isRisk, Red, Darker[Green]]},
Filling -> Axis, FillingStyle -> Opacity[0.2, If[isRisk, Red, Green]]
],
(* 图层3:辅助标注 *)
Graphics[{
(* 动态箭头:只有发生偏移时才显示 *)
If[currentShift > 0.1,
{Blue, Arrowheads[0.03], Arrow[{{90, 160}, {currentPeak, 160}}]},
Nothing
],
(* 垂直参考线:机器检测的位置 *)
{Dashed, Lighter[Gray], Line[{{90, 0}, {90, 200}}]},
(* 文本标注 *)
Text[Style["Standard (12 o'clock)", Gray, 10], {90, 190}],
If[currentShift > 0.1,
Text[Style["Temporal Shift: " <> ToString[NumberForm[currentShift, {3, 1}]] <> " deg", Blue, 12, Bold],
{(90 + currentPeak)/2, 175}],
Nothing
]
}],
(* 界面设置 *)
Frame -> True,
FrameLabel -> {"Position (Degrees)", "RNFL Thickness (um)"},
GridLines -> {{90}, Automatic},
GridLinesStyle -> Directive[LightGray, Dashed],
ImageSize -> 500,
(* 使用英文标题避免乱码 *)
PlotLabel -> Style["Dr. X's Myopic Shift Simulator", 18, Bold, FontFamily -> "Helvetica"]
]
],
(* 交互滑块 *)
{{AL, 23.5, "Axial Length (mm)"}, 22.0, 30.0, 0.1, Appearance -> "Labeled"},
TrackedSymbols :> {AL}
]
3.5.1 代码解读
运行这段代码,试着拖动“眼轴长度”的滑块:
- 当 AL = 23.5mm(标准)时:红色曲线(患者)与灰色阴影(数据库标准)完美重合。机器显示绿灯。
- 当 AL = 28.0mm(高度近视)时:红色曲线明显 向左(颞侧)移动。
- 请注意 (12点钟) 的位置:灰色的标准告诉机器这里应该很厚,但红色的实测线在这里已经开始下降了。
- 结果:机器测到的厚度 < 标准厚度 -> 报红(误诊)。
- 真相:厚度峰值并没有消失,它只是移到了 左右。
3.6 结语:从“看红”到“看峰”
Dr. X,现在你可以更自信地回复那位年轻的程序员了。
你不需要因为那片红色的区域而惊慌。你需要做的是:
- 看眼轴:确认是否属于高度近视。
- 看峰值:在 TSNIT 曲线图上,用你的肉眼去找那个波峰。如果波峰虽然移位了,但依然高耸、完整,那么他很可能只是“被拉伸了”,而不是“萎缩了”。
Jansonius 模型是伟大的,但它是静态的。在高度近视日益流行的今天,我们需要一个动态的坐标系。
但在这一切的背后,还有一个更深层的问题:神经纤维 为什么 要向颞侧移动?这种移动仅仅是机械拉伸吗?还是说,神经纤维在生长时,就像聪明的蚂蚁一样,在寻找一条 最省力 的路径?
在下一章,我们将从单纯的“拉伸地图”,进阶到 “寻找路径”。我们将引入物理学中最优美的原理—— 最小作用量原理 ,看看神经纤维是如何在弯曲的视网膜上冲浪的。
第4章:最小作用量路径——为何视神经要绕路?
“自然界不做无用功。若要从 A 点到 B 点,光线选择时间最短的路,而生命选择能量最省的路。”
—— 皮埃尔·德·费马 (Pierre de Fermat)
4.1 引言:优雅的弓形束
Dr. X,请回想一下教科书上那张经典的视网膜神经纤维层(RNFL)走行图。
视神经纤维从视网膜周边出发,汇聚向视盘。但在黄斑 (Macula) 附近,它们并没有走直线,而是优雅地绕了一个大弯,形成了特征性的 “弓形束” (Arcuate Bundles)。正是这两个弓形区域,构成了青光眼视野缺损最常见的“Bjerrum 暗点”。
你是否想过:为什么它们要走弯路?
传统的解释是:“为了避开黄斑中心凹,保证视力敏锐度。” 这没错,但这对我们预测病理没有帮助。
在上一章,我们发现高度近视会“拉伸”地图;而在这一章,我们要探讨的是 “路径的选择”。
目前的临床金标准(Jansonius 模型)是通过统计大量正常人的眼底,画出了一堆数学曲线来拟合这个形状。但这就像是用圆规去描摹叶子的形状——你画得很像,但你不知道叶子为什么长这样。
今天,我们要换一种思路。我们不“描摹”路径,我们来 “生长”路径。我们将利用微分几何中的 测地线 (Geodesic) 概念,重现大自然在胚胎发育期所做的选择。
4.2 蚂蚁、高山与能量场
为了理解视神经的逻辑,请想象一只微小的蚂蚁(神经轴突的生长锥),它要从视网膜的颞侧爬回视盘(家)。
4.2.1 规则一:懒惰是美德(最小作用量原理)
这只蚂蚁非常“懒”,或者说非常高效。它永远通过消耗最少能量的路径回家。
- 在平地上,最省力的路是直线。
- 在球面上,最省力的路是大圆弧(就像飞机的航线)。
在微分几何中,这条“最省力”的路径,就叫做测地线。
4.2.2 规则二:黄斑是一座高山(势能场)
现在的视网膜不再是一张平纸,也不仅仅是一个球。在蚂蚁的感知中,黄斑中心凹不是一个坑,而是一座难以翻越的高山(生物排斥力场)。
之所以这么说,是因为在分子生物学层面,黄斑区会分泌 Slit/Robo 等排斥性导向因子。这在数学上等价于一个高耸的高斯势垒 (Gaussian Potential Barrier)。
4.2.3 决策时刻
当蚂蚁走到黄斑颞侧时,它面临两个选择:
- 直穿黄斑:路程虽短,但要翻越高山,累死(能量成本极高)。
- 绕行:路程变长了,但地势平坦,轻松(能量成本低)。
聪明的蚂蚁选择了绕行。于是,弓形束诞生了。
不是有人画出了弓形,而是 能量场(地形)+ 最小作用量原理(规则) 自然涌现出了弓形。
4.3 计算眼科学实战:Wolfram 虚拟轴突追踪器
Dr. X,不需要复杂的微分方程,我们用 Wolfram Language 来模拟这个“蚂蚁寻路”的过程。
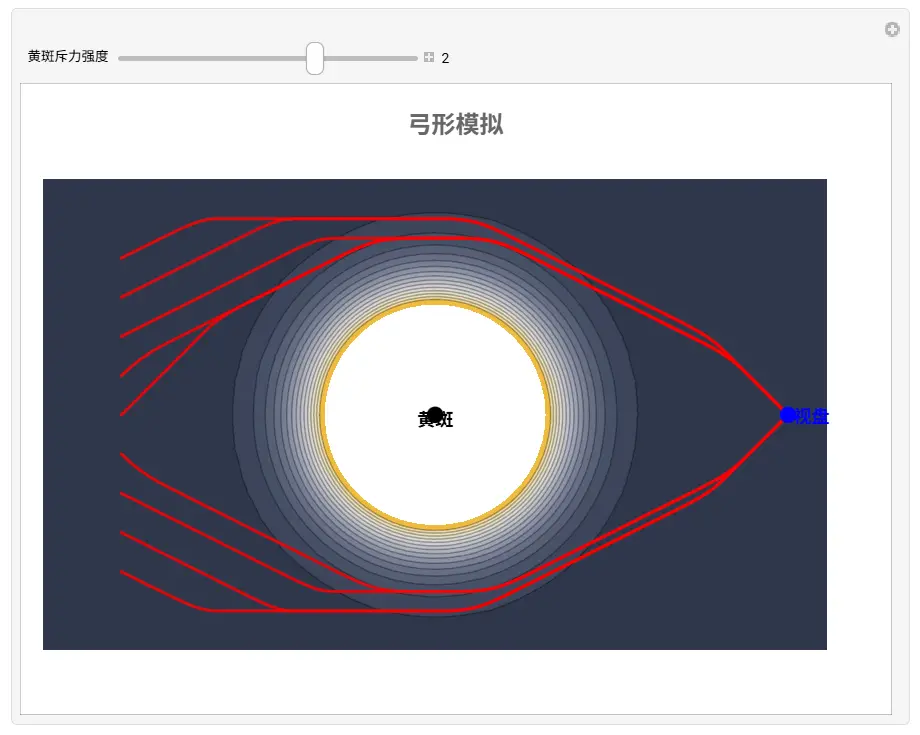
我们将构建一个 “虚拟轴突追踪器”。你只需要告诉程序黄斑和视盘在哪里,它就能自动为你生成视神经的走行图。
代码解读
当你运行这段代码时,你会看到神奇的一幕:
我们并没有命令线条画成弓形,但红色的线条为了避开中间那个虚线标示的“黄斑高能区”,自动弯曲成了完美的上下弓形束。
这就是 计算眼科学 的魅力:我们输入的是物理规则,输出的是解剖结构。
4.4 临床启示:当能量场发生改变
这个模型对临床有什么用?它能解释许多静态地图无法解释的现象。
4.4.1 颞侧中缝:不是一条线,是一个分水岭
在解剖书上,颞侧中缝 (Temporal Raphe) 是一条将上下视网膜分开的水平线。
但在我们的模型中,它是 能量的分水岭。
想象雨水落在山脊上,往左流还是往右流?这取决于山脊的微小倾斜。
- 正常人:黄斑和视盘位置相对水平,中缝也是水平的。
- 变异:如果患者的视盘比黄斑位置高 (Fovea-Disc Angle 较大),能量场就倾斜了。所有的“雨水”(神经纤维)路径都会发生偏转。
临床痛点:这就是为什么有些青光眼患者的视野缺损位置很奇怪,不符合标准的纳斯特阶梯 (Nasal Step)。因为 他们的中缝本来就是歪的。用我们的模型,你可以根据患者特有的黄斑位置,计算出他专属的中缝位置,从而精准对应视野缺损。
4.4.2 高度近视:被拉伸的跑道
当眼轴变长,后巩膜葡萄肿形成时,不仅距离变了,地形的曲率 (Curvature) 也变了。
我们在第2章学过,负曲率(马鞍面)会发散测地线,正曲率(凸面)会汇聚测地线。
高度近视眼底往往由复杂的曲率构成。神经纤维在经过葡萄肿边缘时,会被地形“折射”。
结论:高度近视患者的 RNFL 变薄,有时不是因为神经死了,而是因为地形变了,神经纤维 换了一条路走,导致原本该厚的地方变薄了。
4.5 结语:从查表员到建筑师
Dr. X,传统的医生像是一个 “查表员”:拿着一张标准地图(Jansonius 图),去比对每一个病人。如果病人长得和地图不一样,就认为是病态。
而掌握了微分几何的你,现在是一位 “空间的架构师”。
你知道视网膜上的线条不是画上去的,而是 “流” 出来的。
- 黄斑是石头,视盘是下水道口。
- 神经纤维是水流。
如果石头挪了位置(解剖变异),水流自然会改道。
如果地面塌陷了(葡萄肿),水流自然会分散。
理解了 “最小作用量原理”,你就拥有了预测这些变化的超能力。你不再被红色的误报所欺骗,因为你能看穿那些弯曲路径背后的物理必然。
在下一章,我们将把这个二维的“流”,升级为三维的“通量”。我们将探讨一个更深刻的问题:当视网膜变薄时,视野为什么还是好的?(最优传输与通量守恒)。
第5章:最优传输——光流的守恒
“水之形,避高而趋下。神经之行,避耗而趋简。”
5.1 引言:消失的轴突去哪了?
Dr. X,让我们回到诊室,面对那个令所有眼科医生头疼的瞬间。
你面前坐着一位高度近视的患者。他的 OCT 报告上,视盘颞侧的神经纤维层(RNFL)厚度显示为刺眼的红色——“变薄”。
机器的逻辑很简单:正常人这里有 80 微米厚,他只有 50 微米,所以他“萎缩”了,他有青光眼。
但是,他的视野检查 (Visual Field) 却是完全正常的“白板”。
你陷入了沉思:
- 是视野检查不够灵敏?(潜伏期?)
- 还是 OCT 机器在撒谎?
实际上,轴突并没有消失,它们只是 “摊薄” 了。
想象一条河流。当河道变宽时,水位自然会下降。水流的总量(通量)并没有减少,只是承载它的容器变大了。
在高度近视眼中,眼球后极部的扩张就像河道变宽。如果我们只盯着“水位”(厚度)看,就会误以为水干了。
本章,我们将引入物理学中的 “连续性方程”和“最优传输理论”,不再看静态的“厚度”,而是去计算动态的“通量”。我们将学会区分:什么是病理性的枯竭,什么是物理性的流淌。
5.2 物理直觉:从“画线”到“流体”
在上一章,我们把神经纤维比作爬山的蚂蚁。这一章,为了处理数量巨大的轴突(100万根),我们需要把它们看作一种流体。
5.2.1 连续性方程:生物界的守恒律
不用担心复杂的数学符号,连续性方程 (Continuity Equation) 翻译成临床语言只有一句话:
在一个封闭系统中,如果不发生凋亡(青光眼),流入的轴突数量必须等于流出的数量。
数学表达式简化版:
5.2.2 破解“红病”的密码
让我们用这个公式来审视高度近视眼:
- 正视眼:视盘周围的巩膜环较小(周长 )。为了容纳 100 万根轴突,需要的厚度是 。
- 高度近视:眼球被拉长,巩膜环被撑大,或者因为光学放大率效应,我们扫描的圆周长变成了 。
根据守恒律:
为了维持等式平衡,新的厚度必须变成 。
结论:
OCT 报告上的“变薄”,往往不是病。那是生物体为了适应眼球扩张,必须遵循的物理铁律。
Dr. X,下次看到单纯的 RNFL 变薄时,请先计算一下他的眼轴。如果是长眼轴,那多半只是“河面宽了,水浅了”,而不是“水源枯竭了”。
5.3 动态分水岭:颞侧中缝的秘密
解决了“量”的问题,我们再来解决“方向”的问题。
视网膜上有一条隐形的线,叫做颞侧中缝 (Temporal Raphe)。它位于黄斑的颞侧,是上、下神经纤维束的分界线。
- 中缝以北的轴突,汇入视盘上方。
- 中缝以南的轴突,汇入视盘下方。
5.3.1 屋脊上的雨水
把黄斑颞侧的区域想象成一个屋脊。
雨水(轴突)落在屋脊上,是流向北坡还是南坡,完全取决于屋脊的倾斜角度。
传统的教科书(和 Jansonius 模型)假设所有人的屋脊都是水平的。
但在临床中,有些人的视盘长得高一点,有些人的眼球发生了外旋。这导致“屋脊”发生了倾斜。
5.3.2 为什么视野缺损对不上?
这就是为什么你经常遇到 “结构-功能不匹配” 的第二个原因:
- OCT 显示视盘下方有缺损。
- 根据教科书,这应该对应视野的上方缺损。
- 但病人的视野缺损却跑到了鼻侧水平线附近,甚至跨过了中线。
原因: 这个病人的中缝根本不是水平的!他的“屋脊”是歪的,导致原本属于“下方”的雨水,实际上流到了“上方”的管道里。
利用最优传输理论 (Optimal Transport),我们可以根据视盘和黄斑的相对位置,计算出每个人独特的 “动态中缝”。这不是一条画在纸上的死线,而是一个随地势而变的分水岭。
5.4 计算眼科学实战:Wolfram 流体模拟器
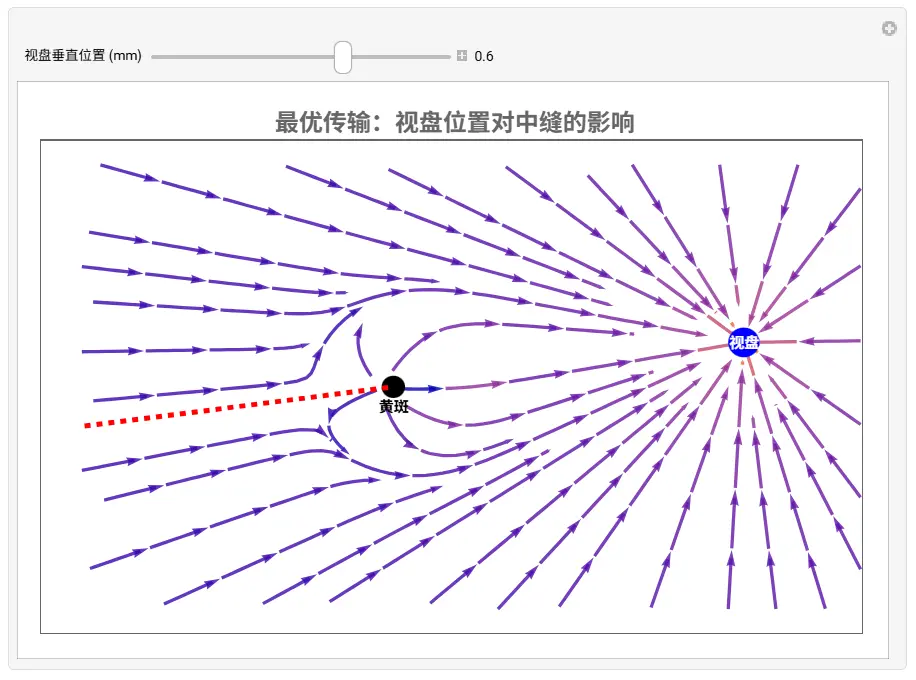
Dr. X,不需要做复杂的计算。我们可以编写一段 Wolfram 代码,为你生成每一只眼睛专属的“轴突流场图”。
这段代码的核心逻辑是:
- 建立地形:把视网膜看作一个流形。
- 设定引力和斥力:视盘是吸水的洞(引力),黄斑是挡水的石(斥力)。
- 让水流淌:模拟轴突寻找阻力最小的路径。
ClearAll["Global`*"]
(* 第5章 5.4 极速版:性能优先的流场模拟 *)
(* 核心修正:
1. 移除 StreamColorFunction,改用纯色,防止云端渲染超时导致"白板"。
2. 手动推导梯度公式,替代 Grad 符号计算,大幅提升响应速度。
3. 降低采样密度至"中等",确保流畅度。
*)
Manipulate[
Module[{
foveaPos = {0, 0},
discPos = {4.5, discY},
(* 变量声明 *)
sinkVector, obstacleVector, totalFlow, rapheAngle
},
(* 1. 物理引擎:直接写出向量公式 (硬编码) *)
(* 汇 (视盘): 向量指向视盘中心,强度随距离衰减 *)
(* 类似于引力场: v = -(p - center) / |dist|^2 *)
sinkVector[pt_] := -1.5 * Normalize[pt - discPos] / (EuclideanDistance[pt, discPos] + 0.5);
(* 障碍 (黄斑): 向量背离黄斑中心 *)
(* 高斯势场的梯度: v = (p - center) * Exp[...] *)
obstacleVector[pt_] := 2.0 * (pt - foveaPos) * Exp[-2.0 * Norm[pt - foveaPos]^2];
(* 总流场 = 汇的吸力 + 山的斥力 *)
totalFlow[pt_] := sinkVector[pt] + obstacleVector[pt];
(* 2. 计算中缝几何角度 *)
rapheAngle = ArcTan[discPos[[1]], discPos[[2]]] / Degree;
(* 3. 极速绘图 *)
Show[
StreamPlot[
totalFlow[{x, y}], {x, -4, 6}, {y, -3, 3},
(* 核心修改:使用纯色线条,确保可见性 *)
StreamStyle -> Directive[Orange, Opacity[0.8], Thickness[0.004], Arrowheads[0.03]],
StreamPoints -> Automatic, (* 自动采样,不强求 Fine *)
PerformanceGoal -> "Speed", (* 告诉系统:快比好看重要 *)
AspectRatio -> Automatic
],
(* 辅助标记 *)
Graphics[{
(* 视盘 *)
{Blue, Disk[discPos, 0.2], Text[Style["视盘", White, Bold], discPos]},
(* 黄斑 *)
{Black, Disk[foveaPos, 0.15], Text[Style["黄斑", Black, Bold], foveaPos, {0, 1.8}]},
(* 动态中缝指示线 *)
{Red, Dashed, Thickness[0.006],
Rotate[Line[{{-4, 0}, {0, 0}}], rapheAngle Degree, {0, 0}]}
}],
Frame -> True, FrameTicks -> None,
PlotRange -> {{-4, 5.5}, {-3, 3}},
ImageSize -> 550,
PlotLabel -> Style["最优传输:视盘位置对中缝的影响", 16, Bold, FontFamily -> "Helvetica"]
]
],
(* 交互滑块 *)
{{discY, 0, "视盘垂直位置 (mm)"}, -2.0, 2.0, 0.1, Appearance -> "Labeled"},
TrackedSymbols :> {discY} (* 只追踪 y 轴变化,防止不必要的重算 *)
]
代码看点
运行这段代码,你会看到:
- 橙色的线条(轴突)像水流一样,优雅地绕过中间红色的黄斑。
- 在黄斑左侧(颞侧),你会看到明显的 分流现象 ——这就是中缝。
- 尝试修改
discPos的坐标(例如改成{1.5, 0.5}),你会发现那条虚线所示的分水岭也随之发生了旋转。 这就是个性化诊断的威力。
5.5 结语:从观察者到架构师
第5章的核心任务,是帮助你建立一双 “透视眼”。
当你再次面对一张红色的 OCT 报告时,请不要只看到“变薄”。
- 用 连续性方程 去思考:这是不是因为河道变宽了?
- 用 最优传输 去思考:这是不是因为水流改道了?
Dr. X,你不再是被机器报警声吓得手忙脚乱的操作员。你是理解了光流守恒定律的空间架构师。你知道,有时候红色不是警告,它只是大自然在不同的几何表面上,为了守恒而做出的妥协。
在下一章,我们将离开视网膜,去探索一个更令人着迷的领域—— 渐进多焦点镜片。我们将用几何学解释,为什么完美的镜片是不存在的,以及如何与必须存在的像散共舞。