第三部分:屈光景观——像差与曲率
第6章:闵克维茨定理——像散的代价
“像散为了让平滑变焦成为可能,而必须支付的几何税。”
6.1 引言:寻找“独角兽”
Dr. X,你的诊室里一定出现过这样的场景:
一位刚步入老视年纪的成功人士坐在裂隙灯前,他对眼镜寄予了厚望:“大夫,钱不是问题。我要最好的镜片。我要看远处的路牌清楚,看手里的股票行情也清楚;中间过渡要像年轻时一样顺滑,而且——最重要的是——我不希望转头时旁边有任何变形。”
你很想满足他,你翻遍了 Zeiss、Essilor、Hoya 的顶级产品目录,看到了无数华丽的术语:“全视野”、“无盲区”、“黄金宽通道”。
但作为 “空间的架构师”,你心里清楚:他想要的这种镜片,在几何上是不存在的。 就像你无法画出一个既是圆形又是方形的图形一样。
这章的任务,不是让你去跟患者讲数学,而是给你一样武器——闵克维茨定理 (Minkwitz Theorem)。它将帮你粉碎商业营销的泡沫,让你理直气壮地告诉患者:像散不是工艺的瑕疵,它是几何的法则。
6.2 物理直觉:被撕裂的橘子皮
在引入公式之前,我们先做一个思想实验。
6.2.1 为什么必须有像散?
想象你手里有一块平整的橡皮膜(代表 0 度的平光镜)。
- 看远:上半部分保持平整。
- 看近:下半部分,你需要把它弄“鼓”起来(增加正球镜度数,Add)。
- 过渡:你必须在这两者之间建立一个平滑的斜坡。
试着做一下。当你把下半部分强行撑起来,同时保持中间连接处平滑时,你会发现侧面必然会起皱褶。
这就是 高斯绝妙定理 (Theorema Egregium) 的通俗版:
- 光焦度 (Power) 是我们想得到的“隆起”。
- 像散 (Astigmatism) 是侧面被迫产生的“皱褶”。
在黎曼流形上,你不可能只改变经线(垂直)方向的曲率,而不引起纬线(水平)方向的扭曲。像散,就是为了维持表面连续性而必须支付的 “几何税”。
6.3 核心定律:惩罚系数
1963年,数学家 Günter Minkwitz 发现了一个让所有镜片设计师绝望的规律。不用担心微积分,这个公式翻译成人话非常简单。
6.3.1 闵克维茨公式
在渐进片中间那条狭窄的“清晰走廊”上,像散的变化遵循以下铁律:
像散的变化速度≈2×度数增加的速度
写成数学符号就是:
∂x∂A≈2∂y∂P
- 右边 (∂y∂P):代表通道设计。如果通道很短,度数这就必须在短距离内急剧增加,这个值就很大。
- 左边 (∂x∂A):代表视野宽窄。这个值越大,意味着你视线稍微往旁边一偏(x 方向),像散就疯涨,视野就越窄。
- 中间的 2:这是惩罚系数。
6.3.2 临床翻译
Dr. X,这个公式告诉你三个残酷的事实:
- 短通道 = 窄视野:如果你为了配合时尚小镜框,选了短通道(度数变化快),那么侧边的像散会以 2 倍 的速度恶化。
- 高 Add = 窄视野:老花度数越高 (Add 大),度数爬坡越陡,旁边的像散“悬崖”就越深。
- 没有奇迹:除非厂商能打破黎曼几何,否则凡是宣称“短通道且全视野”的广告,都是在撒谎。
6.4 计算眼科学实战:Wolfram 验光师助手
让我们写一段简单的 Wolfram 代码,把这个抽象的定理变成你手边的 “处方风险评估器”。我们将计算特定处方下的像散梯度。
(* --------------------------------------------------------- *)
(* 程序名称:Smooth-Flow PAL Topographer (流体渐进地形生成器) *)
(* 版本:V3.0 (去伪影/平滑化版) *)
(* 改进:使用 Sigmoid 函数替代分段函数,模拟真实抛光表面 *)
(* --------------------------------------------------------- *)
ClearAll[SimulateSmoothPAL];
SimulateSmoothPAL[addPower_, corridorLen_, designType_] := Module[
{
(* 空间参数 *)
yMax = 20, yMin = -20, xMax = 20,
(* 1. 几何骨架:使用平滑插值构建清晰区边界 *)
(* 这是一个连续的样条曲线,没有任何折点 *)
boundaryCurve,
(* 2. 物理场:硬度系数分布 *)
stiffnessField,
(* 3. 最终像散函数 *)
astigFunction,
(* 绘图变量 *)
minWidth, startY, endY, plot
},
(* 定义关键节点 *)
startY = 4; (* 通道入口 *)
endY = startY - corridorLen; (* 通道出口 *)
(* 闵克维茨理论宽度 *)
minWidth = 0.5 / (2 * (addPower / corridorLen));
(* --- 核心改进 A: 连续的边界函数 --- *)
(* 使用 Spline (样条) 确保导数连续,没有棱角 *)
boundaryCurve = Interpolation[{
{yMax, 35}, (* 远用极宽 *)
{startY + 4, 15}, (* 远用过渡 *)
{startY, 6}, (* 漏斗口 *)
{(startY + endY)/2, minWidth}, (* 最窄腰部 *)
{endY, minWidth * 1.5}, (* 出口扩张 *)
{yMin, minWidth * 5.0} (* 近用大视野 *)
}, Method -> "Spline", InterpolationOrder -> 3];
(* --- 核心改进 B: 连续的硬度场 --- *)
(* 不再使用 If/Piecewise。使用 LogisticSigmoid 实现柔和过渡 *)
(* 远用区硬度低(0.2),通道区硬度高(2.5),近用区硬度中(1.0) *)
stiffnessField[y_] := Module[{s1, s2},
(* s1: 从远用到通道的过渡开关 *)
s1 = LogisticSigmoid[-(y - startY)*2];
(* s2: 从通道到近用的过渡开关 *)
s2 = LogisticSigmoid[-(y - endY)*2];
(* 混合公式:平滑加权 *)
0.2 * (1 - s1) + (* 远用区权重 *)
(addPower/corridorLen * 1.8) * (s1 - s2 * 0.8) + (* 通道区权重 *)
1.0 * s2 (* 近用区权重 *)
];
(* --- 核心改进 C: 平滑像散计算 --- *)
astigFunction[x_, y_] := Module[{dist, raw},
(* 距离清晰边界的距离 *)
dist = Abs[x] - boundaryCurve[y];
(* Ramp 替代 If: 小于0取0,大于0取值。 *)
(* Power(..., 1.2) 让起坡更自然,不是生硬的直线 *)
raw = stiffnessField[y] * Ramp[dist]^1.1;
(* 限制最大值,防止色彩溢出 *)
Min[raw, addPower * 1.2]
];
(* --- 绘图:高精度渲染 --- *)
plot = ContourPlot[
astigFunction[x, y],
{x, -xMax, xMax}, {y, yMin, yMax},
(* 渲染引擎设置:消除锯齿的关键 *)
PlotPoints -> 80, (* 提高采样点密度 *)
MaxRecursion -> 3, (* 允许更细的网格细分 *)
Exclusions -> None, (* 禁止寻找断点,强制连续渲染 *)
(* 视觉风格 *)
Contours -> Range[0.25, 3.5, 0.25],
ColorFunction -> "TemperatureMap",
ColorFunctionScaling -> False, (* 锁定绝对度数颜色,便于对比 *)
Frame -> True,
FrameLabel -> {None, None},
PlotLabel -> Style[designType, Bold, 13],
(* 装饰覆盖层 *)
Epilog -> {
{Dashed, White, Opacity[0.5], Line[{{-20, startY}, {20, startY}}]},
{Dashed, White, Opacity[0.5], Line[{{-20, endY}, {20, endY}}]},
{Text[Style["配镜十字", White, Bold, 10], {0, 5}]},
{Thick, White, Line[{{-1, 2}, {1, 2}}], Line[{{0, 1}, {0, 3}}]}
},
ImageSize -> 350
];
plot
];
(* ========================================================= *)
(* 输出:高保真对比图 *)
(* ========================================================= *)
Print[Style["V3.0 高保真模拟:消除计算伪影", "Section", Blue]];
Grid[{
{
SimulateSmoothPAL[2.00, 14, "均衡型 (Balanced) \nADD +2.00"],
SimulateSmoothPAL[3.00, 12, "短通道 (Short/Hard) \nADD +3.00"]
}
}, Spacings -> {1, 1}]
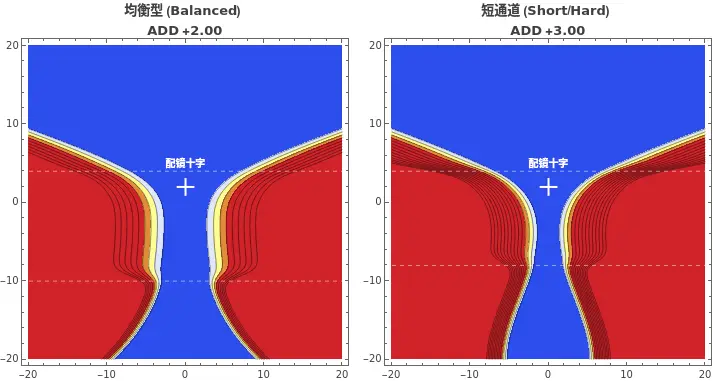
运行结果解读
- 场景 A (短通道):像散梯度高达 0.42 D/mm。这意味着患者瞳孔只需往旁边转 2mm,就会遇到近 1.00D 的散光。这就像透过钥匙孔看世界。
- 场景 B (长通道):像散梯度降至 0.28 D/mm。视野明显变宽。
结论:对于高 Add 的患者,尽量劝说其选择大框、长通道。这不是审美问题,这是数学问题。
6.5 决策矩阵:硬性 vs 软性设计
既然像散无法消除(因为公式里那个 2 无法变成 0),设计师唯一能做的就是 搬运 像散。这引出了两种截然不同的设计哲学,也就是你在订片单上看到的“硬性 (Hard)”和“软性 (Soft)”设计。
我们可以用 “水床效应” 来解释:像散的总量是一定的(像水床里的水),你按下这一头,那一头就会鼓起来。
6.5.1 临床决策对照表
Dr. X,作为架构师,你需要根据患者的职业和性格来选择“搬运”策略:
| 设计类型 |
几何策略 (水床效应) |
优点 |
缺点 |
适用人群 |
沟通话术 |
| 硬性设计 (Hard) |
把像散狠狠地推到最边缘,保住中间的大片净土。 |
远用和近用视野宽阔,中心极清晰。 |
像散区像悬崖一样陡峭。一旦转头快了,周围景物会“晃动”(游泳感)。 |
工程师、绘图员(静态注视为主,对直线变形敏感)。 |
“这副眼镜中间看东西特别清楚,直线特别直。但走路时请多转头,少转眼球,否则边缘会有点晕。” |
| 软性设计 (Soft) |
把像散均匀地“摊大饼”,允许少许散光渗入中心。 |
像散梯度平缓,从清晰到模糊过渡自然,动态视觉好,不容易晕。 |
绝对清晰的范围稍微变窄了。 |
初戴者、高尔夫球手、司机(动态视觉要求高,头动频繁)。 |
“这副眼镜戴着很舒服,走路不晕。虽然看极远处可能有一点点柔和感,但它能让你全天候适应各种活动。” |
6.6 结语:从推销员到架构师
Dr. X,下次当患者要求“完美镜片”时,不要再用含糊的商业术语敷衍。
请拿出纸笔,画一个简单的图,告诉他:
“您的眼睛需要完成从远到近 2.50D 的跨越。为了实现这个跨越,我们必须在空间的某个维度支付‘过路费’。
我们可以选择支付‘视野宽度’(选短通道),也可以选择支付‘边缘清晰度’(选软性设计)。
没有不收费的道路,但我可以为您设计一条最划算的路线。”
这就是闵克维茨定理给你的底气。你不再是一个售卖镜片的推销员,你是一名在弯曲光场中权衡利弊的空间架构师。
在下一章,我们将离开镜片表面,深入角膜内部。我们将看到,那个被我们简化的“眼压”,实际上是一个更加复杂的 应力张量。
第7章:应力张量——不仅是眼压
“眼压是流体的独白,应力是组织的呐喊。当我们只倾听前者时,便错过了角膜最痛苦的求救信号。”
7.1 引言:数字的欺骗
Dr. X,你的诊室里肯定发生过这种“灵异事件”:
- 场景 A:一位老人的眼压只有 11 mmHg(绝对的安全区),但他的视神经却像融化的蜡烛一样逐年枯萎,视野缺损无情进展。(正常眼压性青光眼)
- 场景 B:一位年轻人的眼压高达 24 mmHg,被别的医生判了“青光眼死刑”,但你随访了五年,他的视神经纹丝不动,健康得令人发指。(高眼压症)
你可能会怀疑眼压计坏了,或者角膜厚度 (CCT) 在捣乱。你开始用各种公式去“修正”眼压值。
但作为 “空间的架构师”,我要告诉你一个残酷的真相:修正公式大多是安慰剂。
因为你试图用一个**标量(眼压,Pressure)去描述一个复杂的张量(应力,Stress)**现象。这就像试图用“体重”来衡量一个人的“武功高低”一样,虽然有关联,但完全是两个维度的概念。
本章的任务,就是给你一副 “力学透视镜”。我们将不再纠结于 GAT 读数的准确性,而是直接穿透角膜,去看看那些肉眼不可见的“力线”是如何撕裂组织的。
7.2 物理直觉:从“气球”到“果冻”
在讲数学之前,我们先做一个简单的思想实验。
7.2.1 眼压 vs. 应力:谁才是凶手?
想象你手里有一个气球(代表角膜)。
- 眼压 (Pressure):是你吹进去的气。它是一个标量,只有大小,没有方向(或者说,它向四面八方均匀施压)。
- 应力 (Stress):是气球橡胶壁感受到的拉扯感。它是一个张量,既有大小,又有方向。
关键点来了:
如果你在气球上贴一块胶布(局部变硬),虽然里面的气压没变,但这块胶布周围的应力会突然集中。
如果你把气球某处磨薄了,虽然气压没变,但薄弱处的应力会爆表,导致炸裂。
临床翻译:
青光眼损伤视神经的,不是眼压,是筛板 (Lamina Cribrosa) 承受的应力。
圆锥角膜扩张的,不是眼压,是基质层胶原纤维承受的应力。
既然凶手是“应力”,为什么我们只测“眼压”?
因为眼压好测(喷一下气就行),而应力看不见摸不着。但今天,我们要改变这一点。
7.2.2 为什么必须是“张量”?
想象一块方形的果冻。
- 正应力(拉伸/压缩):你垂直往下按,果冻变矮了。
- 剪切应力(错位):你把手掌放在果冻顶上,水平一推。果冻歪了。
角膜不只是受拉(眼压撑开),它还受剪切(揉眼、眨眼)。简单的眼压读数(标量)无法描述这种复杂的“歪”,只有 应力张量(一个 3×3 的矩阵) 才能完整描述果冻内部每一个点受力的状态。
7.3 核心定律:拉普拉斯的修正
Dr. X,你一定背过这个公式:
T=2tP⋅R
(壁张力 = 眼压 × 半径 ÷ 2倍厚度)
这是经典的拉普拉斯定律。它告诉你:角膜越薄(t 小)、越陡(R 小),张力就越大。
但是,Cynthia Roberts 教授(眼生物力学大神)会告诉你:这个公式是给完美的球体用的,不是给角膜用的。
真实的角膜是 各向异性 (Anisotropic) 的。
- 顺纹拉:沿着胶原纤维的方向,它像钢丝一样硬。
- 逆纹拉:垂直于胶原纤维的方向,它像果冻一样软。
当我们做 LASIK 或 SMILE 手术切断了部分神经纤维时,我们实际上是破坏了角膜的“钢筋网”。这时候,单纯看剩余厚度 (Residual Bed Thickness) 是不够的,我们必须看剩余的力学强度。
7.4 计算眼科学实战:Wolfram 角膜应力云图
让我们用 Wolfram 语言写一段代码,不再看枯燥的数字,而是画出角膜上的 “刺猬图”(矢量场)。
这些箭头代表了应力的方向和大小。
(* --------------------------------------------------------- *)
(* 程序名称:Corneal Stress Tensor Visualizer (角膜应力张量显微镜) *)
(* 功能:模拟并可视化角膜表面的薄膜应力分布 (Laplace模型) *)
(* 核心逻辑:应力(σ) ≈ (眼压 × 曲率半径) / (2 × 厚度) *)
(* --------------------------------------------------------- *)
ClearAll[VisualizeCornealBiomechanics];
VisualizeCornealBiomechanics[pressure_, type_] := Module[
{
(* 1. 几何与物理模型参数 *)
gridRange = 3, (* 模拟角膜直径范围 mm *)
corneaShape, (* 高度函数 Z(x,y) *)
thicknessMap, (* 厚度函数 T(x,y) *)
stressCalculator, (* 应力计算函数 *)
(* 辅助变量 *)
normalVec, tangentVec, zVal, thickness, stressVal,
arrowColor, arrowScale,
surfacePlot, vectorField,
(* 模型参数设定 *)
coneCenter = {0.8, -0.5}, (* 圆锥偏心位置 *)
coneHeight, coneWidth
},
(* ----------------------------------------------------- *)
(* 2. 定义角膜形态 (正常 vs 圆锥) *)
(* ----------------------------------------------------- *)
Switch[type,
"Normal",
(
coneHeight = 0;
coneWidth = 1;
),
"Keratoconus",
(
coneHeight = 1.2; (* 圆锥突起高度 *)
coneWidth = 0.8; (* 圆锥底宽 *)
)
];
(* 基础形态:抛物面 *)
(* 圆锥形态:基础 + 高斯突起 *)
corneaShape[x_, y_] := (x^2 + y^2)/18 +
coneHeight * Exp[-((x - coneCenter[[1]])^2 + (y - coneCenter[[2]])^2) / coneWidth];
(* ----------------------------------------------------- *)
(* 3. 定义厚度分布 (关键病理特征) *)
(* ----------------------------------------------------- *)
(* 正常角膜:周边厚,中心稍薄 *)
(* 圆锥角膜:病灶处急剧变薄 (应力恶化的核心原因) *)
thicknessMap[x_, y_] := Module[{baseThick, coneThinning},
baseThick = 0.55 + 0.02 * (x^2 + y^2); (* 正常分布: 550um *)
(* 如果是圆锥,病灶处厚度减少 *)
coneThinning = If[type == "Keratoconus",
0.25 * Exp[-((x - coneCenter[[1]])^2 + (y - coneCenter[[2]])^2) / coneWidth],
0
];
baseThick - coneThinning
];
(* ----------------------------------------------------- *)
(* 4. 计算生物力学应力 (简化的 Laplace Law) *)
(* ----------------------------------------------------- *)
(* 应力与厚度成反比。越薄的地方,受到的撕扯力越大 *)
stressCalculator[x_, y_] := pressure / (thicknessMap[x, y] * 100);
(* ----------------------------------------------------- *)
(* 5. 生成矢量场 (刺猬的刺) *)
(* ----------------------------------------------------- *)
vectorField = Table[
Module[{n, t1, t2, pos, s, col, len},
pos = {x, y, corneaShape[x, y]};
s = stressCalculator[x, y]; (* 获取局部应力值 *)
(* 计算法线向量 *)
n = Normalize[{-Derivative[1, 0][corneaShape][x, y], -Derivative[0, 1][corneaShape][x, y], 1}];
(* 构造切向向量 (代表沿着角膜表面的拉力) *)
(* 这里简化为沿径向的切线,这是扩张的主要方向 *)
t1 = Normalize[{x, y, 0} - Dot[{x, y, 0}, n]*n];
(* 视觉编码:应力越大,箭头越红、越长 *)
col = ColorData["TemperatureMap"][Rescale[s, {0.2, 0.8}]];
len = Rescale[s, {0.2, 0.8}, {0.2, 0.6}];
(* 如果应力过大,加粗箭头 *)
{
col,
Arrowheads[0.015 + (s * 0.02)],
Opacity[0.8],
Arrow[{pos, pos + t1 * len}] (* 绘制切向拉力箭头 *)
}
],
{x, -gridRange, gridRange, 0.4}, {y, -gridRange, gridRange, 0.4}
];
(* ----------------------------------------------------- *)
(* 6. 渲染 3D 场景 *)
(* ----------------------------------------------------- *)
surfacePlot = Plot3D[
corneaShape[x, y],
{x, -gridRange, gridRange}, {y, -gridRange, gridRange},
(* 表面着色:显示应力云图 *)
ColorFunction -> Function[{x, y, z}, ColorData["TemperatureMap"][Rescale[stressCalculator[x, y], {0.2, 0.8}]]],
ColorFunctionScaling -> False,
Mesh -> None,
PlotStyle -> Opacity[0.3], (* 半透明,以便看到内部结构 *)
Lighting -> "Neutral"
];
(* 组合输出 *)
Show[
surfacePlot,
Graphics3D[vectorField], (* 叠加矢量场 *)
Boxed -> False,
Axes -> False,
ViewPoint -> {0, -2, 1.5}, (* 医生视角 *)
ImageSize -> 350,
PlotLabel -> Style[
Switch[type,
"Normal", "正常角膜 (Normal)\n受力均匀",
"Keratoconus", "圆锥角膜 (Keratoconus)\n局部应力崩溃"
],
Bold, 14, RGBColor[0.2, 0.2, 0.2]
]
]
];
(* ========================================================= *)
(* 临床实战:对比眼压相同但结构不同的两只眼睛 *)
(* ========================================================= *)
Print[Style["--- 第7章:透过眼压看应力 ---", "Section", Blue]];
Print["设定眼压 (IOP): 15 mmHg (临床上完全正常的数值)"];
Print["请观察:虽然气压一样,但红色的箭头揭示了组织内部的‘撕裂感’。"];
Row[{
VisualizeCornealBiomechanics[15, "Normal"],
Spacer[20],
VisualizeCornealBiomechanics[15, "Keratoconus"]
}]
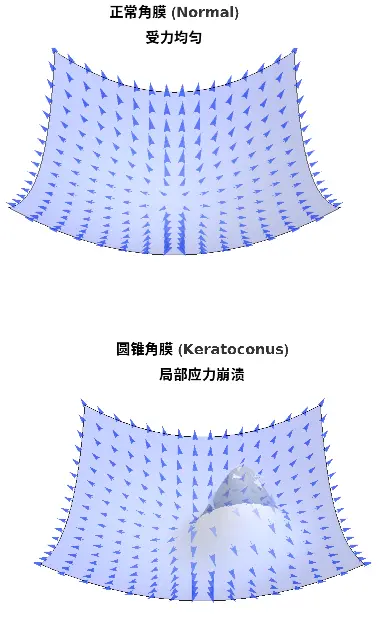
运行结果解读
当你运行这段代码,你会看到一个惊人的现象:
- 正常角膜:箭头分布均匀,长短一致,说明受力平衡。
- 圆锥角膜:在圆锥突起的基底部 (Base),会出现一圈血红色的长箭头。
- 这不仅是几何上的陡峭,这是力学上的 应力集中 (Stress Concentration)。
- 洞察:这就像撕开包装袋一样,一旦有一个缺口(应力集中点),裂痕就会沿着那个点迅速扩大。圆锥角膜就是这样被“撕”开的。
7.5 决策矩阵:从“地毯式轰炸”到“精确制导”
既然我们看到了应力分布是不均匀的,那么现在的角膜交联术 (CXL) 是不是太粗糙了?
目前的 CXL 就像地毯式轰炸:对着角膜中央 9mm 均匀照射紫外线。
结合应力张量理论,未来的治疗将是矢量引导的 (Vector-Guided):
| 治疗策略 |
传统 CXL (Dresden Protocol) |
矢量引导 CXL (Vector-Guided) |
| 理念 |
哪里有病治哪里(覆盖中央)。 |
哪里软弱加固哪里。 |
| 照射区域 |
圆形均一光斑。 |
根据 Wolfram 算出的“红色箭头”区域定制图案。 |
| 能量分布 |
均匀分布。 |
在应力集中环(圆锥基底)加强能量,封锁扩张路径。 |
| 比喻 |
给整条路重铺柏油。 |
给轮胎即将爆裂的最薄处打补丁。 |
| Dr. X 的决策 |
适用于早期、形态规则的病例。 |
适用于偏心圆锥、极薄角膜的抢救性治疗。 |
7.6 结语:做“力”的捕手
Dr. X,这一章的内容可能有点烧脑,但请记住最核心的一句话:
眼压是幻象,应力才是真相。
下次当你面对一位“正常眼压”的青光眼患者,或者一位想要做手术的薄角膜患者时,请闭上眼睛,想象那块透明组织内部正在进行的拔河比赛。
- 不要只盯着 GAT 的读数。
- 去思考胶原纤维的走向。
- 去寻找那些看不见的“红色箭头”。
你不再是一个只会读数的眼压监测员。你是能够洞察力学平衡、预判组织崩塌的空间架构师。
在下一章,我们将进入更激动人心的领域——逆向工程。既然我们已经看透了角膜的形状和受力,我们能不能反过来,设计一个完美的镜片去“中和”这一切?闵可夫斯基问题将给你答案。