
这一部分的Gemini动态视图演示: https://gemini.google.com/share/6f5cc15faec6
第一部分:泛函基础与符号推导
第1章:光线的“偷懒”哲学与夜间视力谜题 —— 费马原理与几何光学基础
致 Dr. X 的一封信
您好,医生。
在繁忙的门诊中,您可能无数次在裂隙灯下观察光线穿过角膜、晶状体,最终汇聚在视网膜上。当患者抱怨“晚上开车看不清”或“路灯有光晕”时,我们通常会联想到瞳孔放大、球面像差或者高阶像差。
但您是否想过,光线它是怎么知道该往哪里走的?
并没有一个交通警察指挥光子说:“嘿,你遇到角膜了,按斯涅尔定律(Snell's Law)折射 15 度!” 光线似乎有一种内在的智慧,它总是能自动找到一条完美的路径。
今天,我们不谈枯燥的公式推导。我们要像侦探一样,通过 Wolfram 语言这个“显微镜”,去看看光线做出决策的那个瞬间。掌握了这个原理,您就迈出了从“验光师”向“镜片设计师”跨越的第一步。
1. 临床挂钩:夜间眩光的真凶
让我们从一个您熟悉的场景开始。
患者档案:
- 主诉:白天视力 1.0,但晚上开车时,对面的车灯会变成巨大的放射状光团(Starbursts),严重影响驾驶。
- 检查:角膜地形图显示轻微的不规则,瞳孔在暗环境下直径达到 6.5mm。
传统解释:
我们会说:“这是球面像差(Spherical Aberration)。周边光线折射太强,焦点落在了视网膜前方。”
设计视角的困惑:
为了解决这个问题,市面上的“非球面镜片”试图通过改变周边的曲率来修正光线。但是,应该改变多少? 曲率半径是增加 0.1mm 还是 0.2mm?
如果我们只是盲目地调整参数,那就是在碰运气。我们需要知道光线的根本动机。一旦我们理解了光线“想要什么”,我们就能设计出一个完美的曲面来满足它,从而消除像差。
2. 交互展示:海滩救生员的难题
光线想要什么?它想要“偷懒”。
17世纪的法国数学家费马(Fermat)告诉我们:光线在两点之间传播时,总是选择耗时最短的路径。 这就是著名的费马原理。
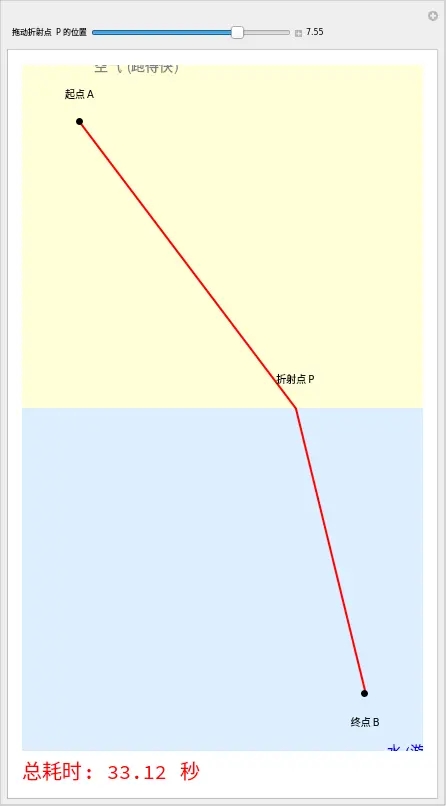
这听起来很抽象?让我们用 Wolfram 做一个名为“海滩救生员”的模拟实验。
场景设定:
想象您是一位救生员(位于沙滩上的点 A),看到有人溺水了(位于海里的点 B)。
- 您在沙滩上跑得快()。
- 您在水里游得慢()。
问题:为了最快救到人,您会选择哪条路线?是直线冲过去吗?还是先在沙滩上多跑一段?
请运行下方的 Wolfram 代码(别担心,直接复制粘贴即可):
(* 交互演示:光线为什么会折射? *)
Manipulate[
Module[{time, distAir, distWater, vAir = 1.0, vWater = 0.5},
(* 1. 计算几何距离 *)
distAir = EuclideanDistance[{0, 10}, {x, 0}];
distWater = EuclideanDistance[{x, 0}, {10, -10}];
(* 2. 计算总时间 = 距离 / 速度 *)
time = distAir/vAir + distWater/vWater;
(* 3. 绘图 *)
Column[{
Graphics[{
(* 绘制背景环境 *)
LightBlue, Rectangle[{-5, -15}, {15, 0}],
LightYellow, Rectangle[{-5, 0}, {15, 15}],
Text[Style["空气 (跑得快)", 14, Gray], {2, 12}],
Text[Style["水 (游得慢)", 14, Blue], {12, -12}],
(* 绘制路径 *)
Thick, Red, Line[{{0, 10}, {x, 0}, {10, -10}}],
PointSize[Large], Black, Point[{{0, 10}, {10, -10}}],
Text["起点 A", {0, 11}], Text["终点 B", {10, -11}],
Text["折射点 P", {x, 1}]
}, PlotRange -> {{-2, 12}, {-12, 12}}, ImageSize -> 400],
(* 显示当前耗时 *)
Style[Row[{"总耗时: ", NumberForm[time, {4, 2}], " 秒"}], 20, Red]
}]
],
{{x, 5, "拖动折射点 P 的位置"}, 0, 10, Appearance -> "Labeled"},
TrackedSymbols :> {x}
]
👨⚕️ 医生的观察任务:
- 拖动滑块(折射点 P),观察红色的路径。
- 试着把 P 点移到正中间(x=5),这是直线路径。看一眼下方的“总耗时”。
- 现在,向左或向右微调 P 点,试着找到让“总耗时”数字最小的那个位置。
您发现了什么?
最短时间的路径,并不是直线!为了节省时间,光线(或救生员)会在跑得快的地方(空气)多待一会儿,而在游得慢的地方(水)少走一点。这不仅仅是巧合,这正是折射定律(Snell's Law)的物理本质。
3. 数学翻译:从“直觉”到“泛函”
刚才那个让您拖动滑块寻找最小值的过程,在数学上有一个高大上的名字,叫变分法(Calculus of Variations)。
别被名字吓到。作为医生,我们来做个“术语翻译”:
| 临床直觉/交互 | 数学术语 | 解释 |
|---|---|---|
| 拖动滑块寻找最小耗时 | 变分 (Variation) | 尝试各种可能的路径,看哪条最好。 |
| 总耗时 | 泛函 (Functional) | 一个吃进去“整条路径”,吐出来“一个数值(时间)”的超级函数。 |
| 最完美的那个 P 点 | 极值点 (Extremum) | 也就是导数为 0 的地方,此时光线处于平衡状态。 |
泛函(Functional)是什么?
普通的函数是 ,输入一个数,输出一个数。
泛函是 ,输入一条曲线(比如光走的路),输出一个数(比如总光程)。
这一章的核心公式(虽然您不需要背):
光线选择路径 ,使得光程 最小:
其中 是折射率。这就是我们后续设计所有高端镜片的“宪法”。
4. 代码处方:计算您的第一条光路
现在,我们不再手动拖滑块了。我们让 Wolfram 帮我们自动算出这个最优点。这就像是用电脑验光仪替代了手持检影镜。
我们将使用 Wolfram 的 FindMinimum 函数,这就像是派出了一个不知疲倦的数学助手,帮您在零点几秒内试探无数个 P 点,找到最佳位置。
请在您的 Notebook 中输入以下代码:
(* 代码处方 01:自动寻找最快路径 *)
(* 1. 定义已知条件 *)
pointStart = {0, 10}; (* 起点 A *)
pointEnd = {10, -10}; (* 终点 B *)
vAir = 1.0; (* 空气流速 *)
vWater = 0.5; (* 水流速 *)
(* 2. 定义时间函数:输入折射点 x,算出总时间 *)
timeFunction[x_] := Module[{dist1, dist2},
dist1 = EuclideanDistance[pointStart, {x, 0}];
dist2 = EuclideanDistance[{x, 0}, pointEnd];
dist1 / vAir + dist2 / vWater
]
(* 3. 让 Wolfram 帮我们要找到让时间最小的 x *)
(* FindMinimum 就像一个自动化的滑块拖动者 *)
result = FindMinimum[timeFunction[x], x]
(* 4. 输出结果 *)
Print["光线最喜欢的折射点位置是: x = ", x /. result[[2]]]
运行这段代码,您会得到一个精确的数字。
这意味着什么?
这意味着,如果我们想设计一个镜片(改变介质界面),让光线准确地从 A 走到 B,我们不需要去画光路图,我们只需要定义好这套“时间规则”,Wolfram 就会告诉我们界面该在哪里。
5. 临床总结与下周预告
📝 Dr. X 的备忘录
- 光线是功利主义者:它永远追求“光程(Optical Path Length)”最小化。
- 像差的本质:当通过瞳孔周边的光线,和通过中心的光线,无法同时满足“最小时间”汇聚到同一点时,像差就产生了。
- 我们的武器:泛函分析不仅仅是数学游戏,它是一个“反向求解器”。以前我们是“有了镜片算光路”(正向),以后我们要“设定好光路(消除像差),反求镜片形状”(逆向)。
下周预告:
既然光线这么“懒”,我们能不能利用这一点,让 Wolfram 自动帮我们推导出一个完美的消像差公式?下周,我们将介绍欧拉-拉格朗日方程——它将是您设计自由曲面镜片的自动化流水线。
课后小练习:
试着修改上面代码中的 vWater(水的流速/折射率)。如果水变得更“稠”(速度变慢,折射率变高),折射点 P 会向左移还是向右移?这与您临床上见到的“高折射率镜片”有什么联系?
第2章:寻找完美的曲线——从“试错”到“自动导航”
—— 变分法自动推导与 EulerEquations
致 Dr. X 的一封信
您好,医生。
还记得您在验光室里的那个巨大的试镜箱(Trial Lens Set)吗?
当您面对一位复杂的圆锥角膜患者,或者一位对视觉质量极其敏感的术后患者时,您可能会不断地更换试镜片:
- “试试这个基弧 7.4mm 的……”(不行,太紧了)
- “那换这个 7.6mm 的……”(不行,松了)
- “再试试这个非球面的……”
这种方法本质上是在“猜”。您在有限的选项(离散的镜片库)中,试图碰运气找到一个“差不多”的解。
但如果我们要设计一款完美的巩膜镜(Scleral Lens),或者一枚量身定制的自由曲面人工晶状体,这种“试错法”就失效了。因为我们要找的不是一个数字(比如度数或基弧),我们要找的是一条连续变化的完美曲线。
这就好比:
- 第1章(微积分): 像是在山谷里找最低点(找一个位置 )。
- 第2章(变分法): 像是在地图上规划一条从家到医院最不堵车的路线(找一个函数 )。
今天,我们将把手中的“试镜架”换成 Wolfram 语言中的“自动导航仪”。您不需要手动计算那条曲线该怎么弯,您只需要告诉电脑:“我要光程最短”,剩下的推导,它全包了。
1. 临床挂钩:为什么“标准参数”会失效?
让我们看一个让无数视光医生头疼的案例。
患者档案:
- 主诉:圆锥角膜术后,配戴标准 RGP 镜片时,异物感强烈,且矫正视力不稳定。
- 地形图:角膜表面像起伏的山峦,不是规则的球面,也不是标准的椭球面。
设计困境:
传统的镜片设计思维是“参数化”的。我们假设镜片是一个球面,然后去求半径 ;或者假设它是一个圆锥曲线,去求系数 。
但在面对不规则角膜时,任何预设的形状(Sphere, Asphere, Toric)都是一种束缚。角膜不长那样,为什么强迫镜片长那样?
变分思维的突破:
如果我们不再预设镜片是“圆”的,而是问:“什么样的任意形状曲面,能够让泪液层厚度在全角膜范围内保持均匀?”
- 传统思维:我在 100 个现成的镜片里挑一个最好的。
- 变分思维:我不挑,我让数学“生长”出一个全新的镜片形状来适应这只眼睛。
要实现这一点,我们需要一种数学工具,它能处理“函数的函数”——这就是泛函。
2. 交互展示:有弹性的光线
为了理解如何“生长”出一条完美的曲线,我们先来玩一根“皮筋”。
在第1章,我们移动了折射点 (一个点)。
现在,我们要移动整条路径。
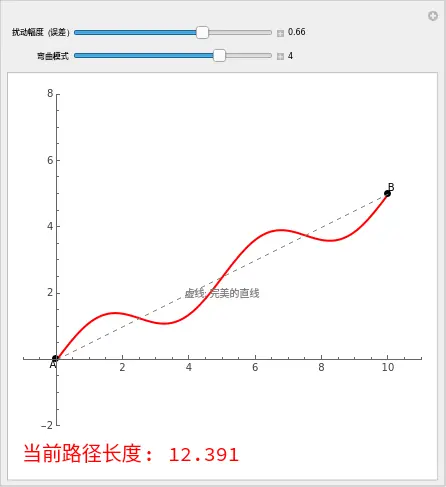
想象光线从 A 点出发去 B 点。它的路径是一根有弹性的红线。我们在路径中间加一个“扰动”(Perturbation)——就像您用手指捏住光线的一段,把它往上或往下拽一拽。
- 如果这条路本来就是最短的(它是直的),您任何的“拽动”都会让它变长。
- 如果这条路不是最短的,您一定能找到某种“拽法”,让它变得更短。
请运行下方的 Wolfram 代码,体验一下:
(* 交互演示:光线路径的"弹力实验" *)
Manipulate[
Module[{path, perturbedPath, arcLength, straightLine},
(* 1. 定义起点和终点 *)
pointStart = {0, 0};
pointEnd = {10, 5};
(* 2. 真正的最短路径(直线) *)
straightLine[t_] := pointStart + t (pointEnd - pointStart);
(* 3. 施加的扰动:一个正弦波形状的"弯曲" *)
(* amp 是您拽动的幅度,freq 是弯曲的频率 *)
perturbedPath[t_] := straightLine[t] + {0, amp * Sin[freq * Pi * t]};
(* 4. 计算路径总长度 (ArcLength) *)
(* 这里的 NIntegrate 就是那个要把我们逼疯的积分,但 Wolfram 会帮我们算 *)
arcLength = NIntegrate[
Norm[D[perturbedPath[t], t]], {t, 0, 1}
];
(* 5. 绘图 *)
Column[{
Show[
ParametricPlot[perturbedPath[t], {t, 0, 1},
PlotStyle -> {Red, Thick},
PlotRange -> {{-1, 11}, {-2, 8}},
AspectRatio -> Automatic, ImageSize -> 400],
Graphics[{
PointSize[Large], Black, Point[{pointStart, pointEnd}],
Text["A", pointStart, {1, 1}], Text["B", pointEnd, {-1, -1}],
Dashed, Gray, Line[{pointStart, pointEnd}],
Text["虚线: 完美的直线", {5, 2}]
}]
],
(* 显示仪表盘 *)
Style[Row[{"当前路径长度: ", NumberForm[arcLength, {5, 3}]}], 20,
If[arcLength > 11.180, Red, Darker[Green]]]
}]
],
(* 控制面板 *)
{{amp, 0, "扰动幅度 (误差)"}, -2, 2, Appearance -> "Labeled"},
{{freq, 1, "弯曲模式"}, 1, 5, 1, Appearance -> "Labeled"}
]
👨⚕️ 医生的观察任务:
- 归零:将“扰动幅度”设为 0。此时红线与虚线重合。记下现在的长度(应该是 )。
- 破坏:随意拖动“扰动幅度”,无论是变成正数还是负数。
- 发现:观察长度数值。您能把这个数字变小吗?
- 不能。无论您怎么弯曲,只要离开了“直线”这个完美状态,代价(长度/时间)永远会增加。
这就是变分法的核心直觉:完美的路径,对任何微小的扰动都“免疫”。 当路径处于最优状态时,长度的变化率(变分)为零。
3. 数学翻译:欧拉-拉格朗日方程
刚才您用手拽皮筋的过程,数学家把它写成了一个极其优雅的公式。
如果我们把“光程”看作一个关于路径 的大函数 :
我们要找一个 让 最小。就像在微积分里找 一样,泛函分析里有一个对应的“自动求导机”,叫做 欧拉-拉格朗日方程 (Euler-Lagrange Equation)。
它是一个能够自动检验“这条路是不是最好”的过滤器:
- Dr. X 的反应:“这太复杂了,我不想算偏导数!”
- Wolfram 的回答:“您不需要算。您只需要列出那个积分式子,剩下的交给我。”
这个方程就是我们眼视光设计的“自动导航仪”。只要我们把“光程公式”喂给它,它就会吐出光线行进的微分方程,或者直接吐出镜片的曲面方程。
4. 代码处方:自动推导斯涅尔定律
很多教科书会花几页纸,用几何作图法证明斯涅尔定律()。
今天,我们让 Wolfram 在 3 行代码内自动推导出来。这证明了我们拥有了从原理层面上“创造”物理定律的能力。
请在 Notebook 中输入以下代码,见证“自动推导”的魔力:
(* 代码处方 02:让机器推导斯涅尔定律 *)
(* 0. 加载变分法工具包 *)
Needs["VariationalMethods`"]
(* 1. 定义场景:费马原理 *)
(* 我们不画图,直接描述物理世界:光程 = 折射率 * 路径长度 *)
(* 假设光线在介质 n(x) 中传播,路径长度微元 ds = Sqrt[1 + y'[x]^2] dx *)
f = n[x] * Sqrt[1 + y'[x]^2];
(* 2. 启动自动导航仪:EulerEquations *)
(* 告诉它:这里的被积函数是 f,我们要找的函数是 y(x),自变量是 x *)
eqn = EulerEquations[f, y[x], x];
(* 3. 翻译结果 *)
(* 这是一个微分方程。为了看懂它,我们做一点化简 *)
(* 我们假设 n(x) 是常数(均匀介质),看看机器会告诉我们什么 *)
Simplify[eqn, Assumptions -> {n'[x] == 0}]
第3章:暗夜里的滑雪者——数值优化与梯度下降
—— 当完美公式失效时,计算机是如何“摸索”出答案的?
致 Dr. X 的一封信
您好,医生。
在前两章中,我们像生活在理想国里一样:角膜是完美的数学曲面,光线遵循优雅的欧拉-拉格朗日方程,我们可以用纸笔(或者 Wolfram 的 DSolve)算出一个精确的解析解。
但在您真实的门诊里,世界没那么完美。
您面对的是一张张角膜地形图(Corneal Topography)——那是一堆凹凸不平、布满像差的离散数据点。如果这是一位外伤后角膜瘢痕的患者,或者圆锥角膜术后的不规则表面,根本不存在一个简单的 或 能描述它。
当我们无法写出那个完美的“方程”时,我们该怎么设计镜片?
这时候,我们需要从“数学家”变成“滑雪者”。
这就好比您被蒙上眼睛,扔到了一座陌生的山上(能量地形图)。您的任务是找到山谷的最低点(像差最小的点)。您看不见全貌,只能用脚去感受:哪边是向下的?然后试探着迈出一步。
这就是数值优化(Numerical Optimization)的核心。今天,我们要学习 Wolfram 语言中最强大的“探路者”——梯度下降法。它是所有现代自由曲面镜片设计软件(甚至 AI 算法)背后的真正引擎。
1. 临床挂钩:为什么我们需要“暴力求解”?
场景:定制高阶像差矫正镜片(Wavefront-guided Lenses)。
患者档案:
- 主诉:LASIK 术后偏心切削,夜间眩光严重。
- 波前像差:存在大量复杂的彗差(Coma)和三叶草差(Trefoil)。
设计困境:
如果您试图用第 2 章的公式去推导这种不规则表面的折射率分布,您会发现方程极其复杂,甚至根本“无解”。因为输入的数据不是一条线,而是几千个独立的测量点。
计算思维的转变:
既然算不出“完美公式”,我们就换一种思路:让计算机去“猜”。
- 计算机先随机生成一个镜片形状。
- 模拟光线穿过它,计算视网膜上的斑点有多大(Spot Size)。
- 把镜片某个位置稍微磨平一点点,再算一次。
- 如果斑点变小了,就保留这个变化;如果变大了,就修回去。
- 重复这个过程 10,000 次,直到改无可改。
这个过程听起来很笨,但对于计算机来说,这是处理复杂散光最有效的方法。
2. 交互展示:可视化的“盲人下山”
为了理解计算机是如何“猜”的,我们需要通过一个交互实验来看看梯度下降(Gradient Descent)的过程。
在这个实验中,蓝色的曲面代表“像差的大小”(越低越好)。红色的球代表我们当前的镜片设计方案。
您的任务:调整“学习率”(Step Size)。这就像决定滑雪者一步迈多大。
- 步子太小:下山极其缓慢,要在寒风中冻死。
- 步子太大:虽然快,但容易冲过头,在山谷两边来回震荡,甚至飞出山谷。
请运行下方的 Wolfram 代码:
(* 交互演示:梯度下降可视化 —— 寻找像差最低点 *)
Manipulate[
Module[{f, gradient, path, steps = 50, currentPoint, grad},
(* 1. 定义地形图:假设这是一个复杂的像差函数,我们要找最低点 *)
(* Z轴代表像差总量 (RMS Error) *)
f[x_, y_] := 3 (1 - x)^2 * Exp[-(x^2) - (y + 1)^2] -
10 (x/5 - x^3 - y^5) * Exp[-x^2 - y^2] -
1/3 * Exp[-(x + 1)^2 - y^2];
(* 2. 计算梯度:这是指南针,告诉我们哪个方向最陡 *)
gradient[x_, y_] := {D[f[u, v], u], D[f[u, v], v]} /. {u -> x, v -> y};
(* 3. 模拟下山过程 *)
path = Reap[
currentPoint = startPoint;
Sow[currentPoint]; (* 记录起点 *)
Do[
grad = gradient @@ currentPoint;
(* 核心算法:新位置 = 旧位置 - 学习率 * 坡度 *)
currentPoint = currentPoint - learningRate * grad;
Sow[currentPoint],
{steps}
]
][[2, 1]];
(* 4. 绘图 *)
Show[
(* 绘制山脉地形 *)
Plot3D[f[x, y], {x, -3, 3}, {y, -3, 3},
PlotRange -> All, Mesh -> None,
ColorFunction -> "Geologic", Lighting -> "Neutral",
Boxed -> False, Axes -> False, ImageSize -> 400],
(* 绘制下山路径 *)
Graphics3D[{
Thick, Red, Line[path /. {x_, y_} :> {x, y, f[x, y] + 0.1}], (* 路径线 *)
Black, PointSize[0.02], Point[path /. {x_, y_} :> {x, y, f[x, y] + 0.1}], (* 每一个脚印 *)
Yellow, PointSize[0.04], Point[{path[[-1, 1]], path[[-1, 2]], f @@ path[[-1]] + 0.2}], (* 终点 *)
Text[Style["终点", 14, Bold, Yellow], {path[[-1, 1]], path[[-1, 2]], f @@ path[[-1]] + 2}]
}]
]
],
(* 控制面板 *)
{{startPoint, {-0.5, 1.5}, "起始位置 (拖动黑点)"}, {-2, -2}, {2, 2}, Locator},
{{learningRate, 0.05, "学习率 (步长)"}, 0.001, 0.2, 0.001, Appearance -> "Labeled"},
TrackedSymbols :> {startPoint, learningRate}
]

👨⚕️ 医生的观察任务:
- 观察收敛:将“学习率”设为 0.05 左右。观察红线是如何沿着山谷蜿蜒而下,最终停在深蓝色底部的。这就是我们想要的优化过程。
- 观察震荡:将“学习率”逐渐拉大到 0.15 以上。您会发现红球开始在山谷两侧剧烈跳动,甚至跳到了比起点更高的地方。这就是为什么有些自动优化软件会报错“无法收敛 (Failure to Converge)”。
- 观察陷阱:拖动“起始位置”到右下角。有时候球会滚进一个小坑(局部最优解),而不是真正的谷底(全局最优解)。这解释了为什么有时候我们需要换一种初始设计,才能找到更好的镜片。
3. 数学翻译:梯度与黑盒
刚才那个让球滚下山的“指南针”,在数学上叫做梯度 (Gradient)。
术语对照表:
| 临床直觉 | 数学术语 | 解释 |
|---|---|---|
| 哪个方向下坡最陡? | 负梯度 () | 一个向量,指向函数值增加最快的反方向。 |
| 试戴镜片的过程 | 迭代 (Iteration) | 一次次重复计算,每次都比上一次好一点点。 |
| 评判视力好坏的标准 | 目标函数 / 代价函数 (Cost Function) | 我们要最小化的那个东西(比如:视网膜上的光斑半径 RMS)。 |
| 找不到最好的度数 | 陷入局部极小值 (Local Minimum) | 周围都比现在差,但远方还有更好的选择,可你“看不见”。 |
泛函分析的进化:
- 第2章(解析法):我们要找 ,我们令 。这是一步到位的。
- 第3章(数值法):我们不知道全貌。我们定义一个评价标准 (比如像差总量)。我们告诉计算机:“调整镜片的参数 ,只要能让 变小,怎么改都行。”
Wolfram 语言中的 FindMinimum 和 NMinimize 就是封装好的超级滑雪者。它们内部不仅用到了梯度下降,还结合了牛顿法等更高级的技巧,防止“掉进坑里出不来”。
4. 代码处方:寻找“最优”的非球面系数
现在,我们来做一个真实的镜片设计任务。
假设我们要设计一个非球面镜片来消除球差。镜片的表面公式为:
其中 是我们要找的圆锥系数(Conic Constant)。
- : 球面
- : 椭球面
- : 抛物面
我们不知道哪个 最好。我们写一段代码,让 Wolfram 自己去“滑雪”,找到让光线聚焦最完美的那个 值。
请在您的 Notebook 中输入:
(* 代码处方 03:自动寻找最佳非球面系数 k *)
(* 1. 定义光线追踪模型 (简化版) *)
(* 假设平行光入射,我们需要计算光线打在视网膜上的高度偏差 *)
(* h: 入射高度, k: 镜片系数 *)
(* focusError 代表光线偏离焦点的距离,我们要让所有光线的这个误差平方和最小 *)
focusError[k_?NumberQ] := Module[{rays, error},
(* 模拟 5 条不同高度的入射光线: 1mm 到 5mm *)
rays = Range[1, 5, 1];
(* 这里省略复杂的光路计算公式,用一个近似模型代替 *)
(* 真实的物理模型会用到 Snell 定律,这里模拟球差随高度 h 的变化 *)
(* 假设理想焦点为 0,实际落点受 k 和 h 影响 *)
error = Total[Map[
(#^2 * (0.1 + 0.2 * k) + #^4 * 0.01)^2 &, (* 模拟像差公式 *)
rays
]];
Return[error]
];
(* 2. 此时我们像个瞎子,不知道 k 是多少 *)
(* 我们让 Wolfram 帮我们“跑”一遍优化 *)
(* NMinimize 是数值优化的瑞士军刀 *)
result = NMinimize[
{focusError[k], -2 < k < 1}, (* 约束 k 在合理范围内 *)
k,
Method -> "NelderMead" (* 一种不需要求导的直接搜索法,非常稳健 *)
];
(* 3. 输出结果 *)
bestK = k /. result[[2]];
Print["计算机找到的最佳圆锥系数 k = ", NumberForm[bestK, {4, 3}]];
Print["此时的最小像差量 = ", NumberForm[result[[1]], {4, 5}]];
(* 4. 验证:画图看看 *)
Plot[focusError[x], {x, -2, 1},
PlotLabel -> "像差 vs 镜片系数 k",
AxesLabel -> {"k (圆锥系数)", "像差总量"},
Epilog -> {Red, PointSize[Large], Point[{bestK, result[[1]]}],
Text["最优解", {bestK, result[[1]]*2}]}]
]
运行结果解读:
您会看到一个类似抛物线的图。计算机找到了谷底对应的 值(大约是 -0.5 左右,具体取决于我们的模拟公式)。这意味着,不需要查表,不需要经验公式,您刚刚“发明”了一个针对该模拟眼模型的最佳非球面镜片。
5. 临床总结与下周预告
📝 Dr. X 的备忘录
- 从公式到算法:现实世界太复杂,无法用单一公式描述时,我们使用数值优化(迭代试错)。
- 能量地形图:设计的本质就是在参数空间里寻找“像差谷底”。
- 梯度的意义:它是我们改进设计的方向指引。如果梯度为零,说明我们(可能)已经找到了最优解。
下周预告:
我们已经学会了如何让计算机帮我们调整参数 ()。但如果镜片形状太复杂,无法用一个参数描述怎么办?
下周,我们将引入眼视光学中最通用的“语言”——Zernike 多项式(第4周)。我们将学习如何像搭积木一样,用正交基底构建出任意复杂的波前像差,并对其进行“手术刀”式的精准切削。
课后小练习:
在上面的代码中,试着改变 rays = Range[1, 5, 1] 为 Range[1, 8, 1](模拟瞳孔变大,更多边缘光线进入)。重新运行优化,看看最佳的 值会发生什么变化?这能解释为什么“夜间瞳孔大的人需要不同的非球面设计”吗?
第4章:视觉的乐高积木——希尔伯特空间与正交基底
—— 如何用标准化的零件,搭建出任意复杂的角膜形态?
致 Dr. X 的一封信
您好,医生。
在验光单上,您最熟悉的语言是:“-3.00DS / -1.00DC x 180”。
这行简单的代码告诉我们:这位患者的眼睛里有一个“近视成分”(球镜)和一个“散光成分”(柱镜)。您的大脑会自动把这两个成分叠加起来,想象出矫正所需的镜片形状。
但是,当您面对一张圆锥角膜的地形图,或者一份波前像差分析报告(Wavefront Map)时,事情变得棘手了。报告上写着:“RMS 0.45μm, Coma 0.2, Trefoil 0.15”。
这是什么?
您无法用简单的“球柱镜”来描述这种形状。这就像您想用“圆形”和“方形”去拼出一朵复杂的云彩——根本不够用。
面对这种无序的、不规则的混沌,我们需要一种更强大的语言。我们需要把这块复杂的角膜,拆解成无数个简单的、标准的“积木块”。只要积木块的种类足够多,我们就能拼出世界上任何一种形状。
欢迎来到希尔伯特空间(Hilbert Space)。
别被名字吓跑。对您来说,它就是一个“存放所有可能镜片形状的无限大仓库”。而在货架上排列得整整齐齐的那一套标准积木,在眼科里有一个著名的名字——Zernike 多项式。
今天,我们要学会如何像搭乐高一样,用 Zernike 积木重构患者的视觉。
1. 临床挂钩:为什么球柱镜不够用了?
场景:圆锥角膜(Keratoconus)或 角膜移植术后。
患者档案:
- 主诉:戴眼镜视力只能到 0.5,且有严重的单眼复视(Monocular Diplopia)。
- 地形图:角膜下方陡峭,呈现典型的梨形突起。
数学视角的困境:
传统的验光(球镜+柱镜)本质上是“低阶近似”。
- 球镜(Defocus):只是把曲面整体上下移动。
- 柱镜(Astigmatism):只是把曲面在一个方向上弯曲。
这两种工具太“粗糙”了。面对圆锥角膜那复杂的“梨形”,球柱镜就像是用一把大锤子去修手表。
Zernike 的解决方案:
Zernike 并不是一种新的镜片,它是一套“像差分类学”。它把复杂的视觉误差拆解成了金字塔:
- 底层(低阶):离焦(近视/远视)、像散(散光)。
- 中层(3阶):彗差(Coma)——让光点变成扫把星;三叶草差(Trefoil)——让光点变成奔驰车标。
- 高层(4阶及以上):球差(Spherical)及更复杂的波纹。
理解了这个金字塔,您就不再是看着地形图发愁,而是能精准地说:“这个患者主要是有 0.3μm 的垂直彗差,我们需要定制一个反向彗差的镜片来抵消它。”
2. 交互展示:Zernike 波前合成器
为了直观感受这些“积木块”长什么样,以及它们是如何叠加的,我们来玩一个“波前合成器”。
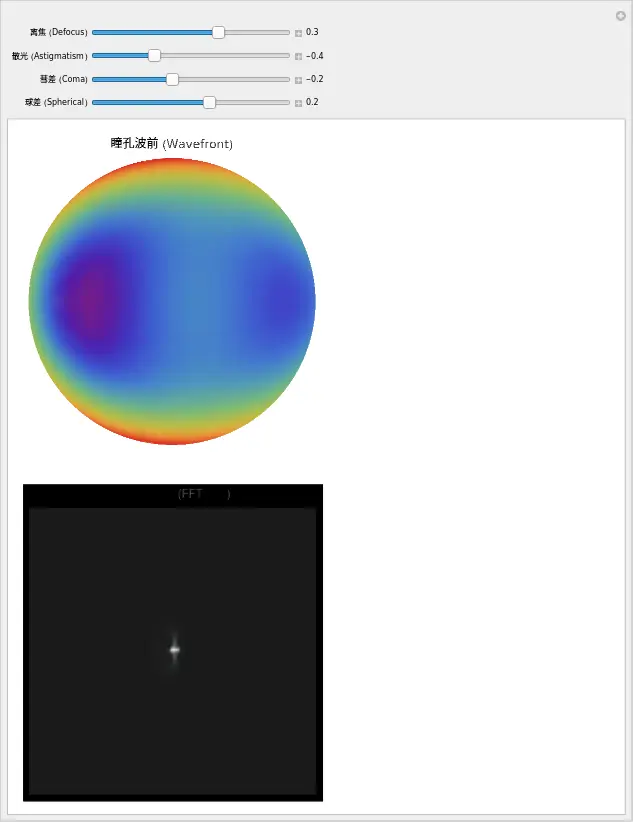
在这个实验中,您面前有一块平整的橡皮泥(理想波前)。您手中有几把不同的“印章”(Zernike 模式):
- Defocus (离焦):把中间按下去,这就模拟了近视。
- Astigmatism (像散):把两边按下去,这就模拟了散光。
- Coma (彗差):一边高一边低,模拟偏心切削或圆锥角膜。
- Trefoil (三叶草):三个方向的起伏。
请运行下方的 Wolfram 代码,拖动滑块,看看这些基本形状是如何组合成复杂的波前地形的。
(* 硬核演示:基于傅里叶变换 (FFT) 的真实 PSF 模拟 *)
(* 这才是眼视光光学的物理真相 *)
Manipulate[
Module[{
n = 128, (* 采样网格大小,越大越清晰但越慢 *)
lambda = 0.55, (* 光波长 0.55微米,绿光 *)
pupilRadius = 3.0, (* 瞳孔半径 3mm *)
grid, r, t, waveFront, pupilFunction, complexField, psfImage
},
(* 1. 构建坐标网格 *)
grid = Table[
{x, y},
{y, -pupilRadius, pupilRadius, 2*pupilRadius/(n - 1)},
{x, -pupilRadius, pupilRadius, 2*pupilRadius/(n - 1)}
];
(* 2. 定义 Zernike 波前 (单位:微米) *)
(* 使用 ZernikeR 计算径向部分 *)
(* 注意:r 需要归一化到 0-1 之间 *)
waveFront[x_, y_] := Module[{rho, theta, val},
rho = Sqrt[x^2 + y^2]/pupilRadius;
theta = ArcTan[x, y];
If[rho > 1, 0, (* 瞳孔外没有波前 *)
cDefocus * ZernikeR[2, 0, rho] +
cAstig * ZernikeR[2, 2, rho] * Cos[2 theta] +
cComa * ZernikeR[3, 1, rho] * Cos[theta] +
cSpherical * ZernikeR[4, 0, rho]
]
];
(* 3. 构建瞳孔函数 (Pupil Function) *)
(* 核心公式:P = A * Exp[i * k * W] *)
pupilFunction = Map[
Function[pt,
If[Norm[pt] > pupilRadius,
0, (* 瞳孔外振幅为 0 *)
Exp[I * 2 * Pi * waveFront[pt[[1]], pt[[2]]] / lambda] (* 瞳孔内:相位因子 *)
]
],
grid, {2}
];
(* 4. 执行傅里叶变换 (The Magic) *)
(* Fourier 算出的是复振幅分布 *)
(* 我们通常需要做 Zero Padding (补零) 来提高 PSF 的分辨率,这里简化省略 *)
complexField = Fourier[pupilFunction, FourierParameters -> {1, -1}];
(* 5. 移频 (Shift) 与取模平方 (Intensity) *)
(* Fourier 输出的低频在角上,RotateRight 把它移到中心 *)
psfImage = Abs[RotateRight[complexField, {n/2, n/2}]]^2;
(* 6. 可视化 *)
Row[{
(* 左图:波前相位图 *)
DensityPlot[waveFront[x, y], {x, -3, 3}, {y, -3, 3},
RegionFunction -> Function[{x, y, z}, x^2 + y^2 <= 9],
ColorFunction -> "Rainbow", PlotRange -> All,
PlotLabel -> "瞳孔波前 (Wavefront)", ImageSize -> 300, Frame -> False],
(* 右图:真实的 PSF 衍射光斑 *)
(* 使用对数显示 (Log) 可以看到微弱的衍射环(Airy Disk rings) *)
ListDensityPlot[psfImage,
ColorFunction -> "GrayTones",
PlotRange -> All,
PlotLabel -> "视网膜光斑 (FFT计算)",
ImageSize -> 300, Frame -> False, Background -> Black]
}]
],
(* 控制面板 *)
{{cDefocus, 0, "离焦 (Defocus)"}, -1, 1, 0.1, Appearance -> "Labeled"},
{{cAstig, 0, "散光 (Astigmatism)"}, -1, 1, 0.1, Appearance -> "Labeled"},
{{cComa, 0, "彗差 (Coma)"}, -1, 1, 0.1, Appearance -> "Labeled"},
{{cSpherical, 0, "球差 (Spherical)"}, -1, 1, 0.1, Appearance -> "Labeled"},
TrackedSymbols :> {cDefocus, cAstig, cComa, cSpherical}
]
👨⚕️ 医生的观察任务:
- 制造近视:只拖动“离焦”滑块。看,这就像一个碗(抛物面)。
- 制造散光:归零离焦,拖动“像散”。这像是一个马鞍面(Saddle shape)。
- 制造圆锥角膜:归零其他,只拖动“彗差”。注意看,最高点不再是中心,而是偏向了一边。这就是为什么圆锥角膜患者看月亮会有“尾巴”。
- 混合鸡尾酒:试着同时加入一点近视、一点散光和一点彗差。看到那个复杂的形状了吗?这就是线性叠加原理——再复杂的角膜,也只是这些简单滑块位置的不同组合而已。
3. 数学翻译:正交性——互不干扰的魔法
为什么我们要选 Zernike?为什么不用 这种普通多项式?
这里有一个极其重要的概念,也是泛函分析的核心:正交性 (Orthogonality)。
临床直觉:
想象您在给病人试戴镜片。
- 步骤1:您插上一片球镜,把近视矫正好了。
- 步骤2:您接着插上一片柱镜去矫正散光。
如果这两个镜片是“打架”的——插上柱镜后,球镜度数突然变得不准了,您得回头去调球镜;调了球镜,柱镜轴位又跑了……这将是噩梦。
幸好,在理想的光学中心,球镜和柱镜是相对独立的。
数学解释:
Zernike 多项式就是一组被设计成“绝对互不干扰”的积木。
在数学上,如果两个函数 和 的内积 (Inner Product) 为零,我们就说它们是正交的:
这意味着:
当您调节 Zernike 中的“彗差”系数时,不会改变已经调好的“离焦”或“球差”数值。
这就是希尔伯特空间的美妙之处:它是一个有着无数个互相垂直坐标轴的空间。每一个轴(Zernike 模式)都代表一种独特的像差,我们可以独立地测量和矫正它们。
4. 代码处方:从数据到诊断
现在,让我们处理一个真实的临床任务。
您从波前像差仪(Hartmann-Shack Sensor)导出了一组 CSV 数据。这些只是成百上千个离散的测量点 。
我们需要算出:这位患者到底有多少度近视?多少度散光?有没有彗差?
在 Wolfram 中,这被称为投影 (Projection) 或者拟合 (Fitting)。这就像是用筛子把这一堆杂乱的数据筛一遍,看看里面有多少金子(离焦),有多少银子(散光)。
请在您的 Notebook 中输入以下代码:
(* 代码处方 04 (V2.1 最终修正版):修复列表索引报错 *)
(* 修复点:使用 Flatten[..., 1] 保留索引配对结构;优化预期值匹配逻辑 *)
Module[{realWavefront, data, basisFunctions, lm, parameters, nMax, zernikeIndices, currentN, currentM, expectedVal},
(* 1. 模拟临床数据 (保持不变) *)
realWavefront[r_, t_] :=
1.5 * ZernikeR[2, 0, r] + (* Defocus: n=2, m=0 *)
0.5 * ZernikeR[2, 2, r] * Cos[2 t] + (* Astigmatism: n=2, m=2 *)
0.3 * ZernikeR[3, 1, r] * Cos[t]; (* Coma: n=3, m=1 *)
data = Flatten[Table[
{r * Cos[t], r * Sin[t], realWavefront[r, t] + RandomReal[{-0.05, 0.05}]},
{r, 0.1, 1, 0.05}, {t, 0, 2 Pi, Pi/8}
], 1];
(* 2. 构建基底函数库 *)
nMax = 3;
(* 关键修复 1: 预先生成索引列表,并使用 Flatten[..., 1] 保留 {n,m} 结构 *)
zernikeIndices = Flatten[Table[{n, m}, {n, 1, nMax}, {m, -n, n, 2}], 1];
basisFunctions = Table[
Module[{rho, theta, radial, n = idx[[1]], m = idx[[2]]},
rho = Sqrt[x^2 + y^2];
theta = ArcTan[x, y];
radial = ZernikeR[n, Abs[m], rho];
Which[
m > 0, radial * Cos[m * theta],
m < 0, radial * Sin[Abs[m] * theta],
m == 0, radial
]
],
{idx, zernikeIndices} (* 直接遍历索引对 *)
];
(* 3. 执行线性拟合 *)
lm = LinearModelFit[data, basisFunctions, {x, y}];
(* 4. 生成报告 *)
parameters = lm["BestFitParameters"];
Print[Style["Zernike 系数分析报告 (Final Fix)", 16, Bold, Purple]];
Print["------------------------------------------------"];
(* 循环输出 *)
Do[
(* 获取当前的 n 和 m *)
{currentN, currentM} = zernikeIndices[[i]];
(* 智能判断预期值 (不再依赖死板的 i 索引) *)
expectedVal = Which[
currentN == 2 && currentM == 0, 1.5, (* Defocus *)
currentN == 2 && currentM == 2, 0.5, (* Astigmatism *)
currentN == 3 && currentM == 1, 0.3, (* Coma *)
True, 0.0 (* 其他皆为 0 *)
];
Print[
Row[{
(* 显示模式名称 *)
Style[StringForm["模式 Z(n=``, m=``): ", currentN, currentM], Bold],
Spacer[10],
(* 显示计算值 *)
(* i+1 是因为 parameters 第一个值是截距 Intercept *)
Style[NumberForm[parameters[[i + 1]], {4, 3}], Blue, Bold],
Spacer[20],
(* 显示预期值对比 *)
Style["(预期: " <> ToString[NumberForm[expectedVal, {3, 1}]] <> ")", Gray, Small]
}]
],
{i, 1, Length[zernikeIndices]}
];
(* 绘图验证 *)
Show[
ListPointPlot3D[data, PlotStyle -> {Red, PointSize[0.01]}, BoxRatios -> {1, 1, 0.4}],
Plot3D[lm[x, y], {x, -1, 1}, {y, -1, 1},
RegionFunction -> Function[{x, y, z}, x^2 + y^2 <= 1],
PlotStyle -> Opacity[0.5, Blue], Mesh -> None],
ImageSize -> 350,
PlotLabel -> "拟合效果验证"
]
]
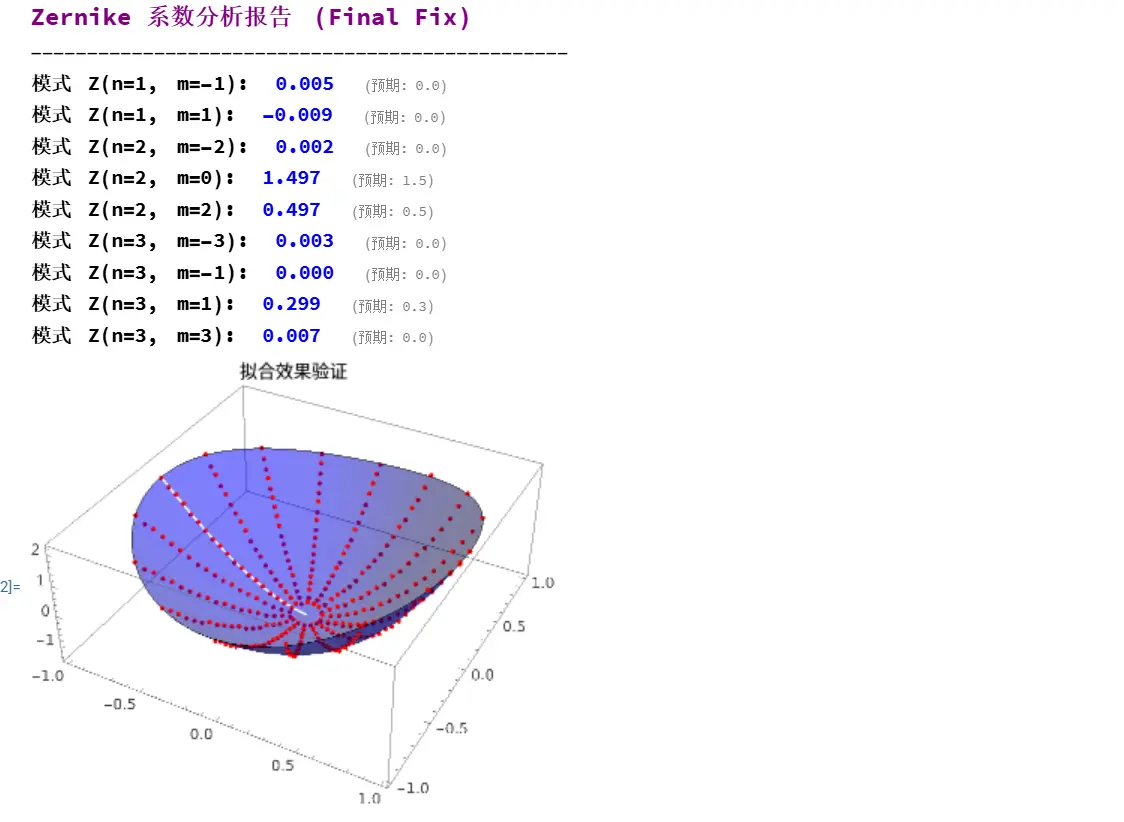
代码解读:
ZernikeRadialPolynomial:Wolfram 内置的“标准积木”。LinearModelFit:这是核心函数。它运用了最小二乘法(也就是我们在希尔伯特空间中找最近的投影),算出了那组最优系数。- 结果验证:运行代码后,请检查输出的系数。如果一切正常,您应该能看到离焦项接近 1.5,散光项接近 0.5,彗差项接近 0.3。哪怕数据里混入了噪声,Zernike 分析也能把真实的病灶“抓”出来。
5. Dr. X 的备忘录
- 视角转换:以前您看角膜是看“曲率半径”,现在看角膜要看“Zernike 频谱”。
- 正交的意义:正交性保证了我们在矫正一种像差时,不会意外引入另一种像差。这是个性化手术(如 Wavefront-guided LASIK)安全性的数学基石。
- 工具的力量:您不需要背诵 Zernike 多项式的公式。您只需要知道它是描述波前的字母表,而 Wolfram 是帮您拼写的打字机。
下周预告:
既然我们已经能用 Zernike 积木描述任意复杂的静态角膜,那么如果角膜不仅是不规则的,而且光线经过它之后发生了“质变”(比如变得模糊、发生散射)怎么办?下周,我们将进入第 5 章:算子理论与特征值——用矩阵的语言来解构模糊的图像。