光场迷彩(1)



光场迷彩(2)


光场迷彩(3)







光场迷彩(Plenoptic Camouflage)技术解析
1. 核心定义与物理目标
光场迷彩不同于传统的二维投影伪装,其核心目标是重构全光函数(The Plenoptic Function)。系统不仅要复制光线的颜色(Color)和强度(Intensity),更重要的是复制光线的方向(Direction)。
1.1 目标函数
在几何光学近似下,任何时刻通过迷彩表面的光场可以表示为 4D 函数 :
- :观察者视平面上的坐标(或角度 )。
- :迷彩蒙皮表面的参数化坐标。
完美隐身条件:
迷彩表面发出的光场 必须等于若该物体不存在时穿过该空间的光场 。
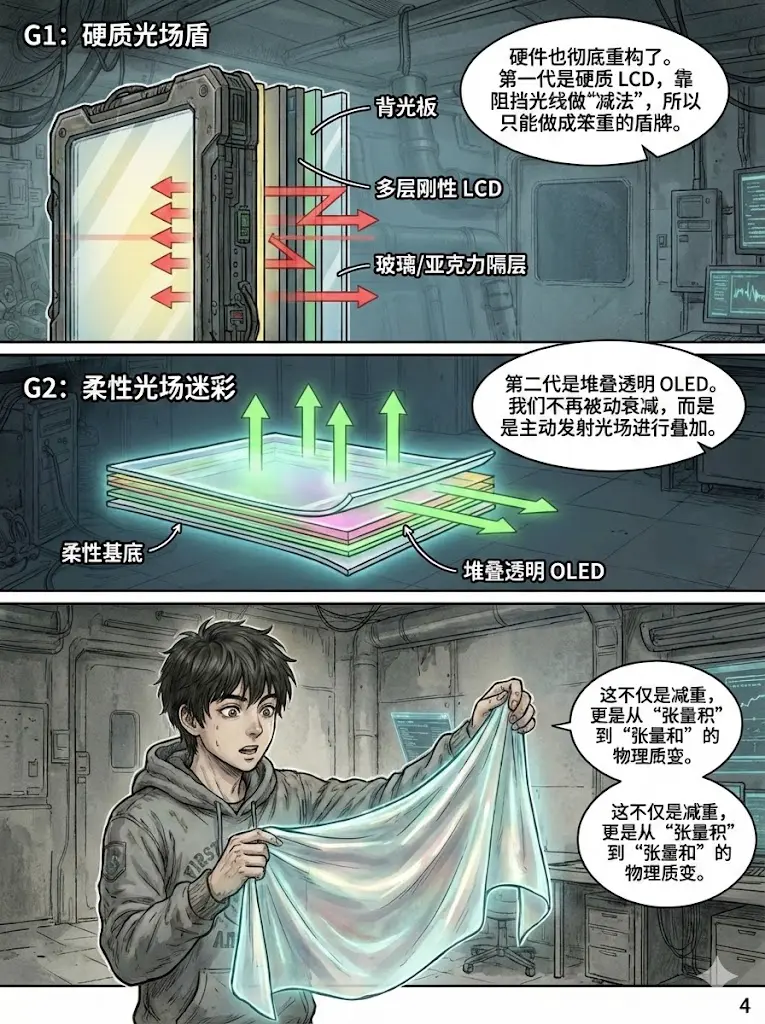
2. 第一代:硬质光场迷彩盾 (Rigid Light Field Shield)
适用场景: 静态防御、重装甲板、低速巷战。
核心特征: 乘法调制、数值优化求解。
2.1 硬件架构:堆叠液晶光阀 (Stacked LCD)
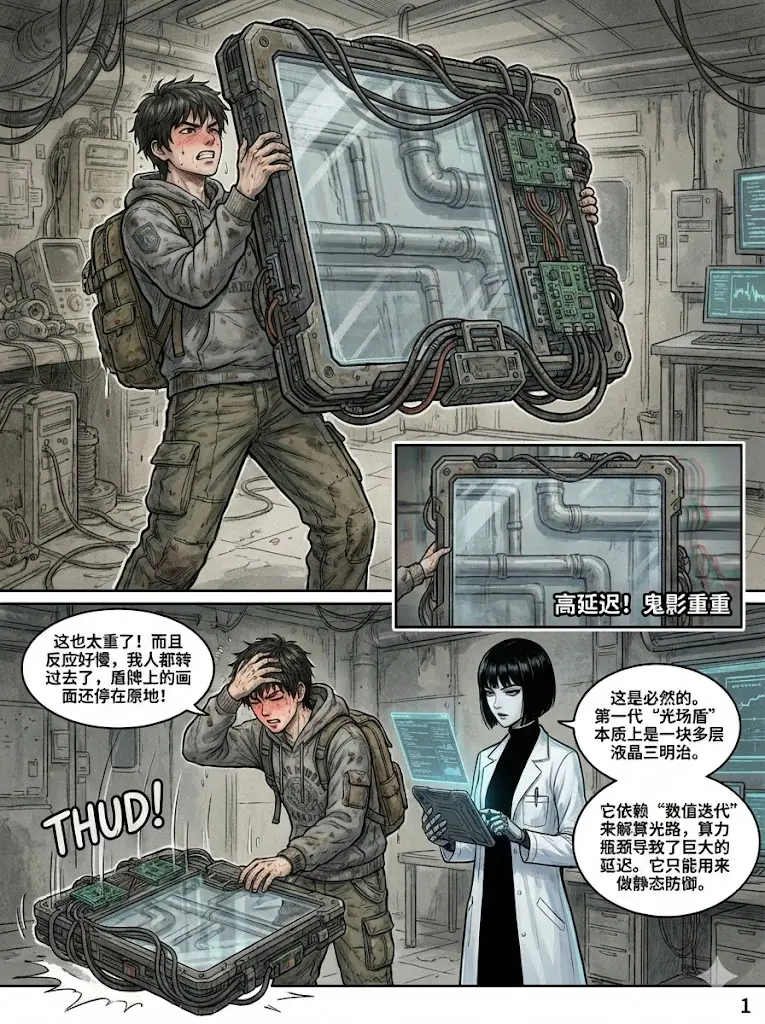
- 结构: 采用“三明治”结构。
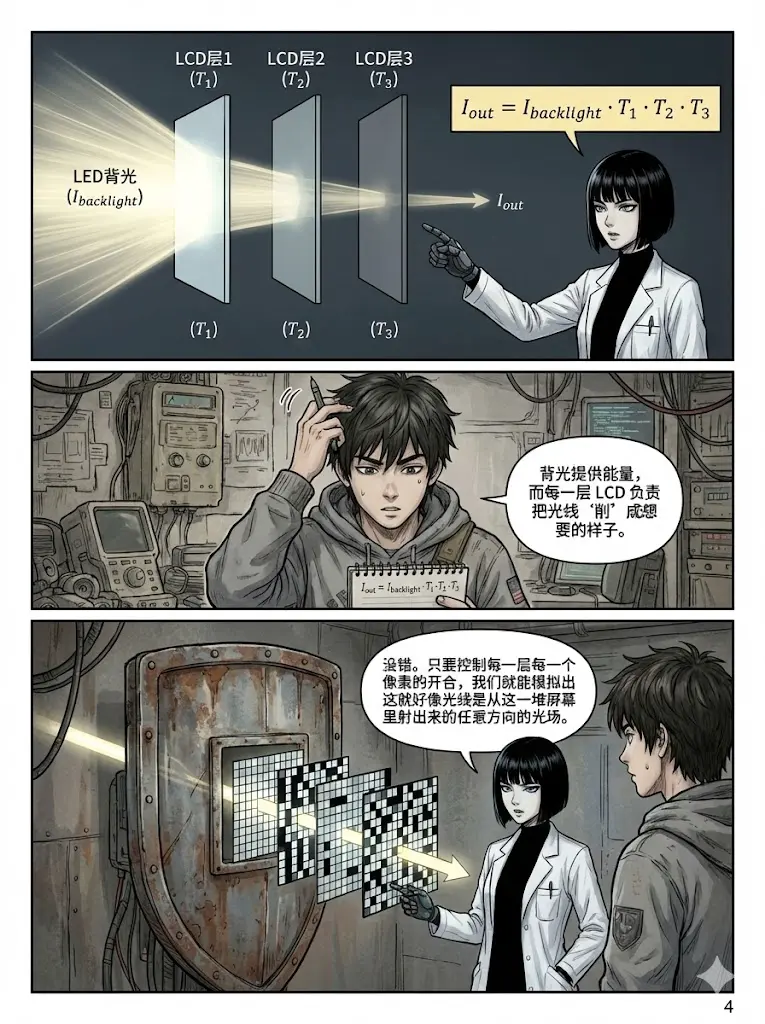
- 底层: 超高亮度 LED 背光阵列(提供光能)。
- 调制层: 3-5 层硬质 LCD 面板,层间由透明介质(如亚克力)隔开以提供物理深度。
- 成像端: 边缘固定的广角阵列相机(已知精确的相对位置)。
2.2 物理原理:张量乘积 (Tensor Product)
光线穿过每一层 LCD 时,其亮度被该点的透射率衰减。这是一个“做减法”的过程。
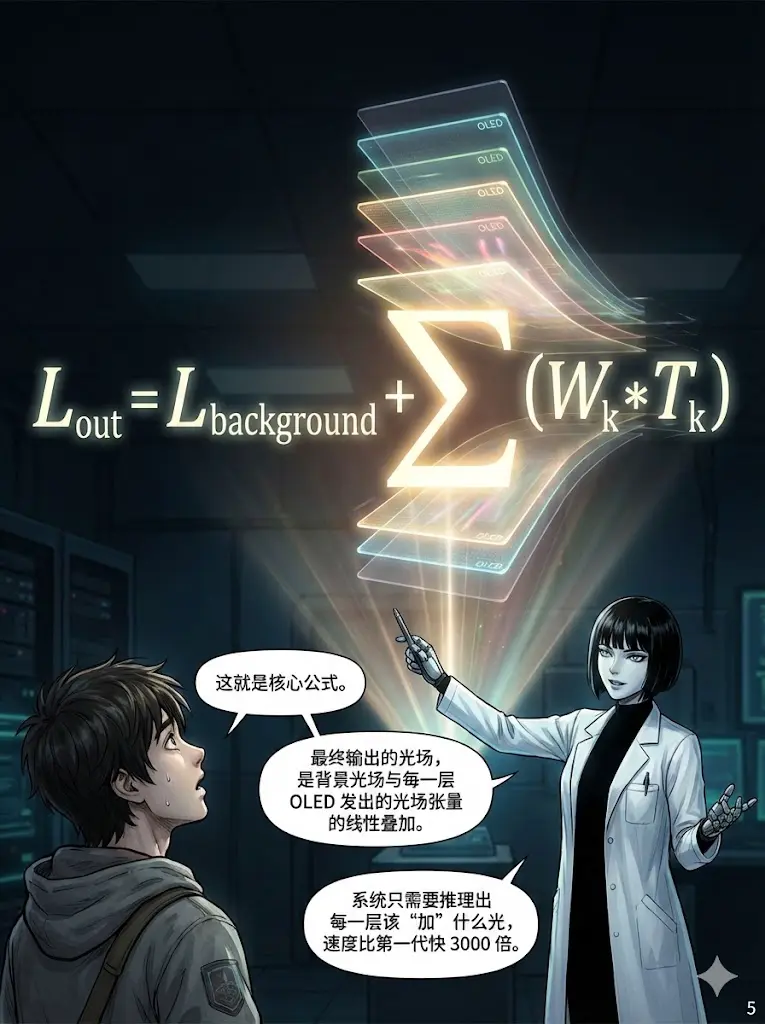
对于一条穿过 层 LCD 的光线,其最终强度 为:
- :第 层 LCD 在光线穿过点 的透射率(0~1)。
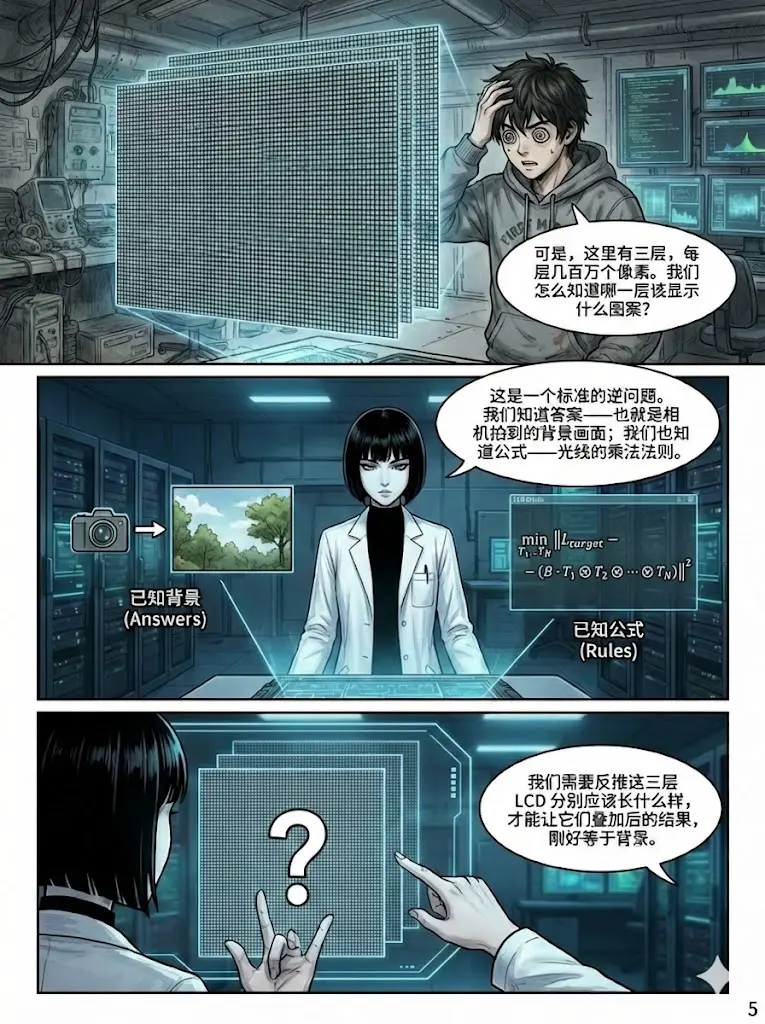
2.3 算法:数值迭代优化 (Iterative Optimization)
由于硬件结构是刚性的,光线传输矩阵是固定的,这构成了一个标准的逆问题。
- 模型: 非负张量分解 (Non-negative Tensor Factorization, NTF)。
- 求解器: 使用 SART 或 Adam 优化器。
- 目标: 最小化重构光场与背景光场的均方误差。
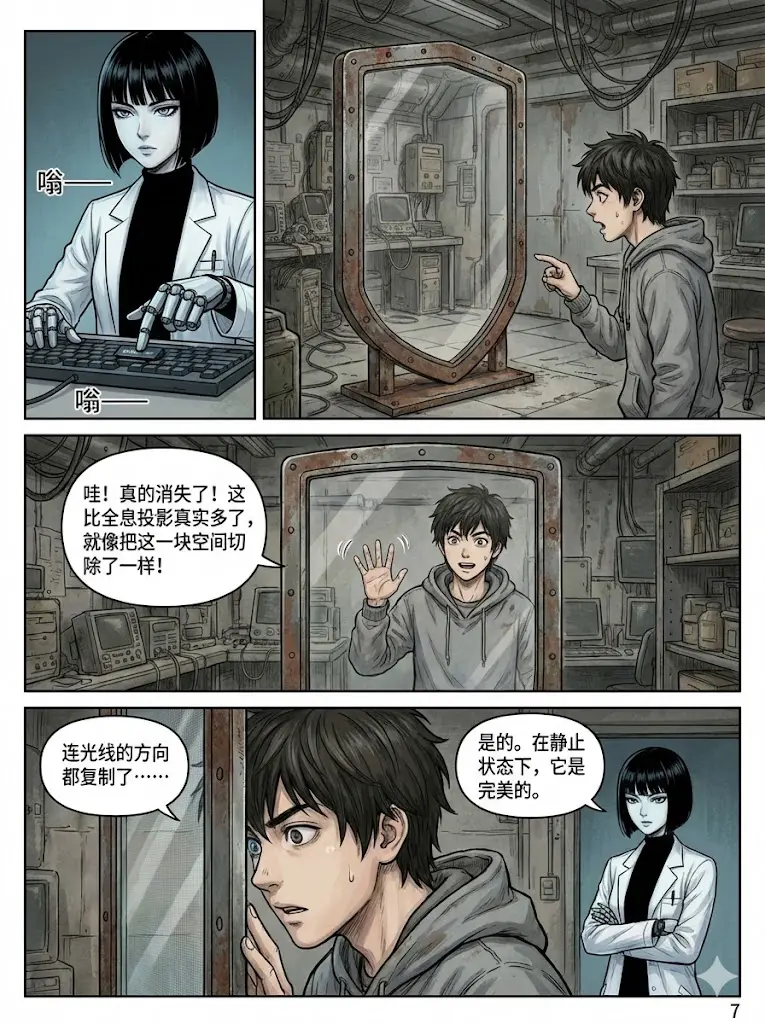
- 局限性: 迭代计算耗时(高延迟),仅适用于静态或准静态场景。背景剧烈变化时会产生计算滞后。
3. 第二代:柔性张量全息斗篷 (Tensor Holography Cloak)
参考文献: Shi, L., et al. "Tensor Holography..." Nature (2021). 1
适用场景: 标准步兵伪装、中距离交战。
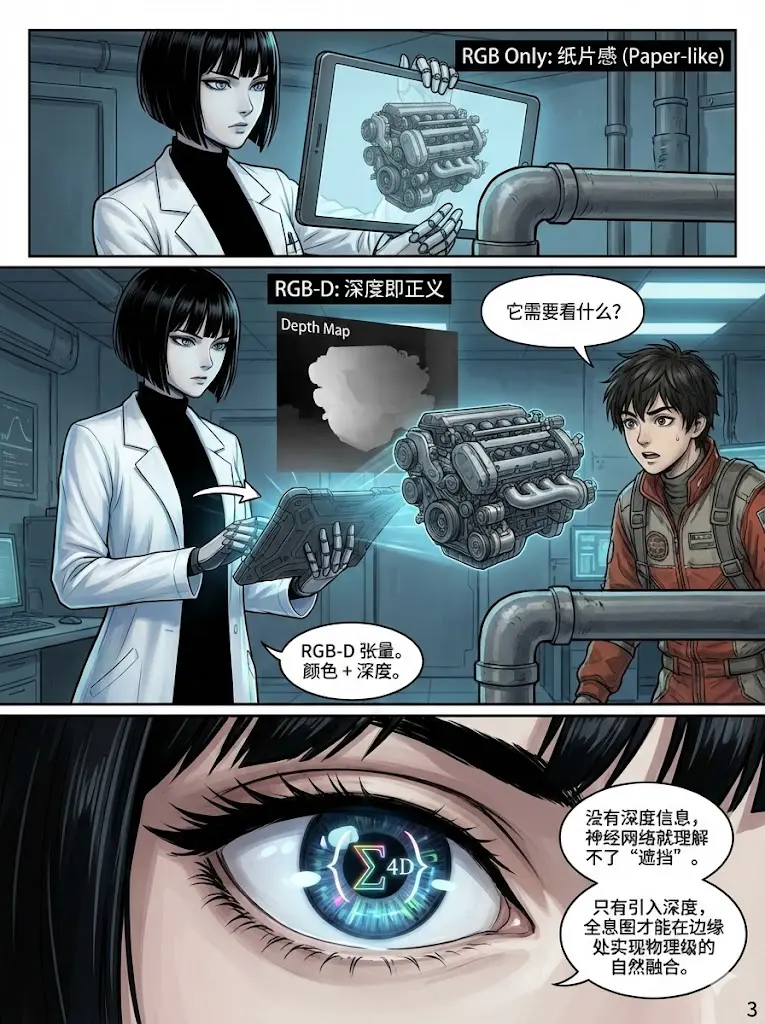
核心特征: 端到端卷积推理、RGB-D 输入。
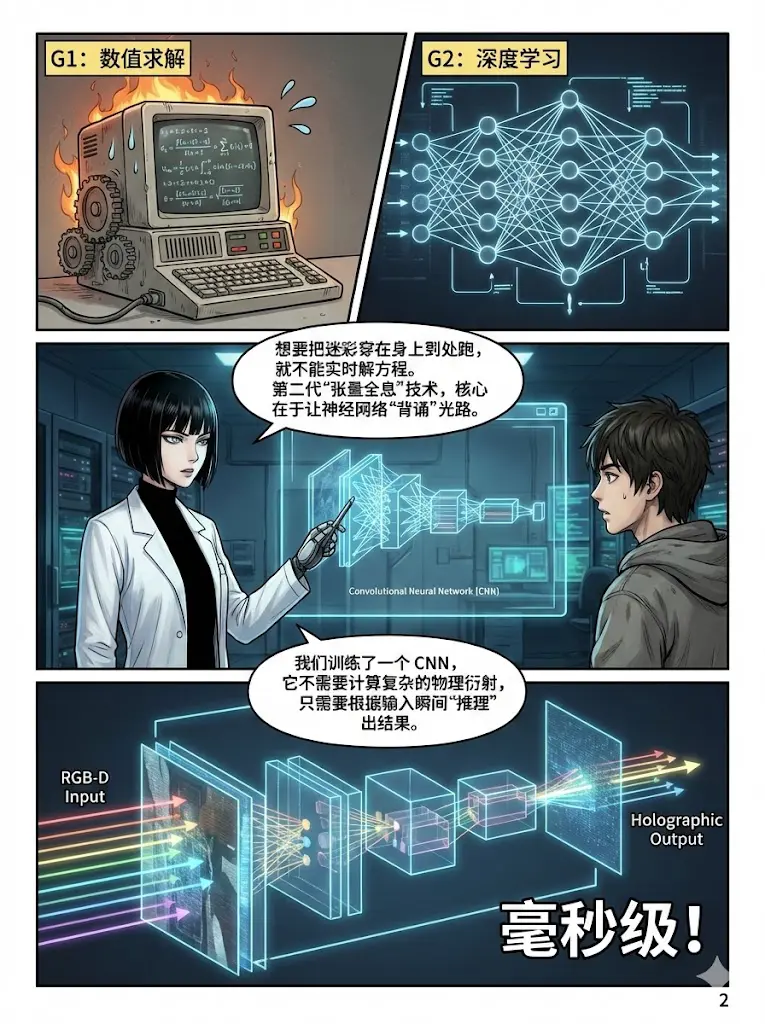
3.1 算法核心:张量全息 CNN (Tensor Holography CNN)
这一代技术标志着算法从“数值求解”向“深度学习推理”的飞跃。系统不再实时解物理方程,而是通过深度神经网络“背诵”光路传播规律。
- 模型架构: 定制的 CNN 网络,包含一系列可训练张量(Trainable Tensors),通过卷积运算直接模拟菲涅尔衍射等光学过程。
- 数据流 (Pipeline):
- Input: RGB-D 张量(颜色 + 深度)。引入深度信息使得网络能理解遮挡关系 (Occlusion),生成的全息图在边缘处具有正确的物理聚焦感。
- Output: 多层显示面板的相位/亮度分布图。
3.2 硬件与优势
- 硬件: 堆叠透明 OLED 或相位调制器。
- 优势:
- 极致实时性: 推理是确定性的前馈过程,无需迭代。速度比第一代提升 3000 倍(毫秒级响应),可在单兵芯片上跑满 60fps,消除动态模糊。
- 局限:
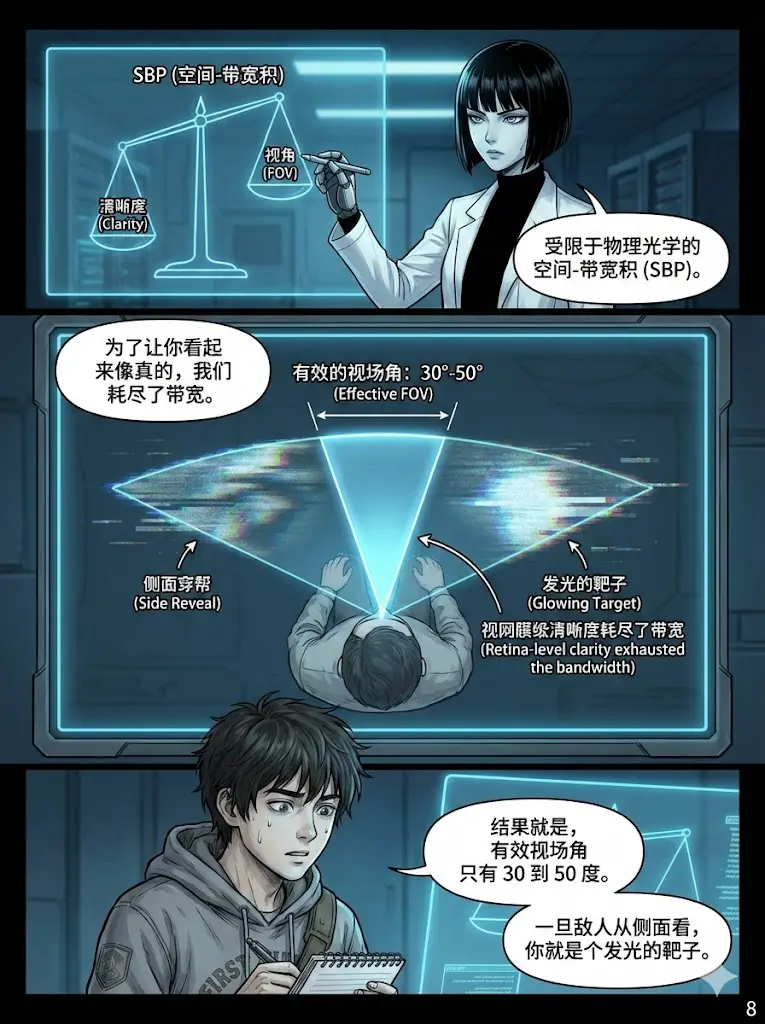
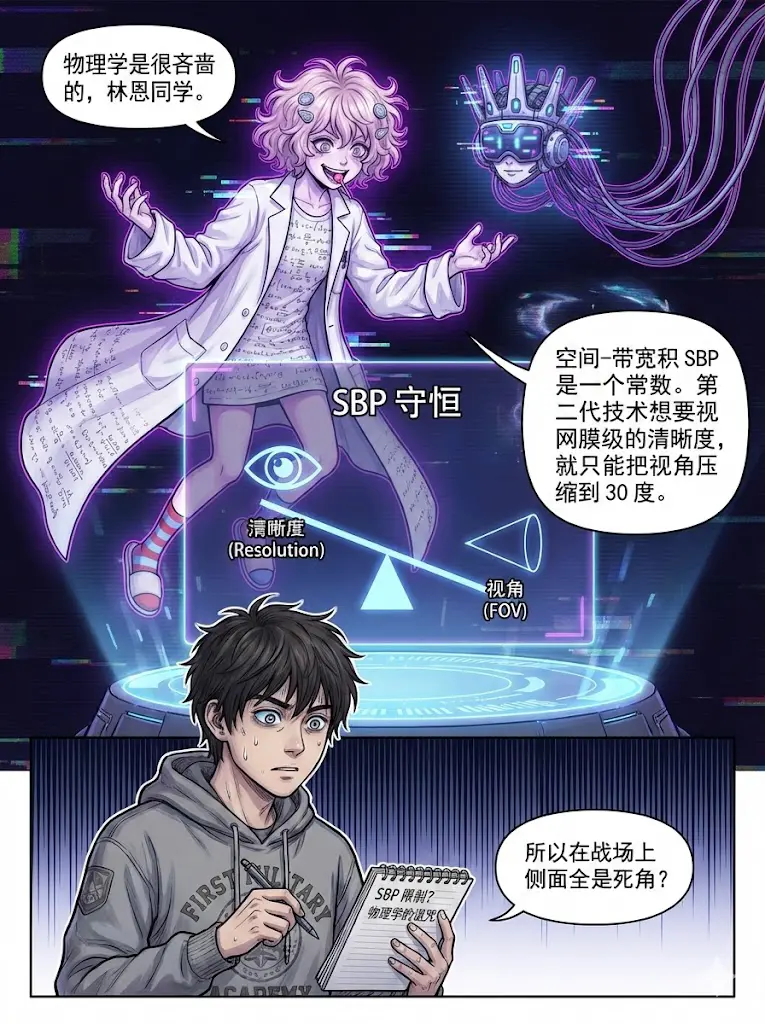
- 视角限制: 受限于物理光学的空间-角度带宽积 (SBP),为了保证清晰度,可视角度通常较窄(约 30°-50°)。超出角度,图像会模糊或消失。
4. 第三代:EyeReal 动态光场伪装 (EyeReal Dynamic Camouflage)
参考文献: Ma, W., et al. "Glasses-free 3D display with ultrawide viewing range..." Nature (2025). 2
适用场景: 特种渗透、近距离接触、多维机动。
核心特征: 动态 SBP 优化、超广角全视差。
4.1 物理瓶颈突破:动态 SBP 优化 (Dynamic SBP Optimization)
传统光场显示受限于 空间-带宽积 (SBP) 守恒:想要大视角,分辨率就低;想要高分辨率,视角就窄。EyeReal 技术通过 AI 主动管理信息,打破了这一僵局。
- 核心机制: 按需光场生成 (On-demand Light Field Generation)。
- 系统不再试图同时为所有可能的角度生成完美图像(那是对算力和带宽的浪费)。
- 迷彩服通过传感器实时追踪观察者(敌方威胁)的位置。
- AI 调度: 神经网络将有限的算力和光学带宽,全部集中用于生成当前威胁视角下的最优光场图像。
4.2 硬件架构:OLED + LCD 相位调制复合单元 (Hybrid OLED-LCD Phase Modulation)
- 结构: 复合堆叠架构。
- 底层: 高密度 OLED / Micro-LED 阵列。作为主动光源,提供高亮度的基础图像与色彩(振幅信息)。解决纯 LCD 方案难以显示高动态范围(HDR)图像的问题。
- 调制层: 多层液晶相位调制器 (Multi-layer LCD Phase Modulators)。叠加在 OLED 之上,不进行光强衰减,而是调制光波的相位 (Phase)。
- 机制: 利用 OLED 提供光能,LCD 层通过相位延迟改变光线的波前(Wavefront),配合 AI 调度实现对光线方向的精确偏转。这种“主动发光 + 相位操纵”的组合,比纯 LCD 堆叠的光效更高,且能适应从极夜到烈日的各种战场光照环境。
4.3 性能指标与战术优势
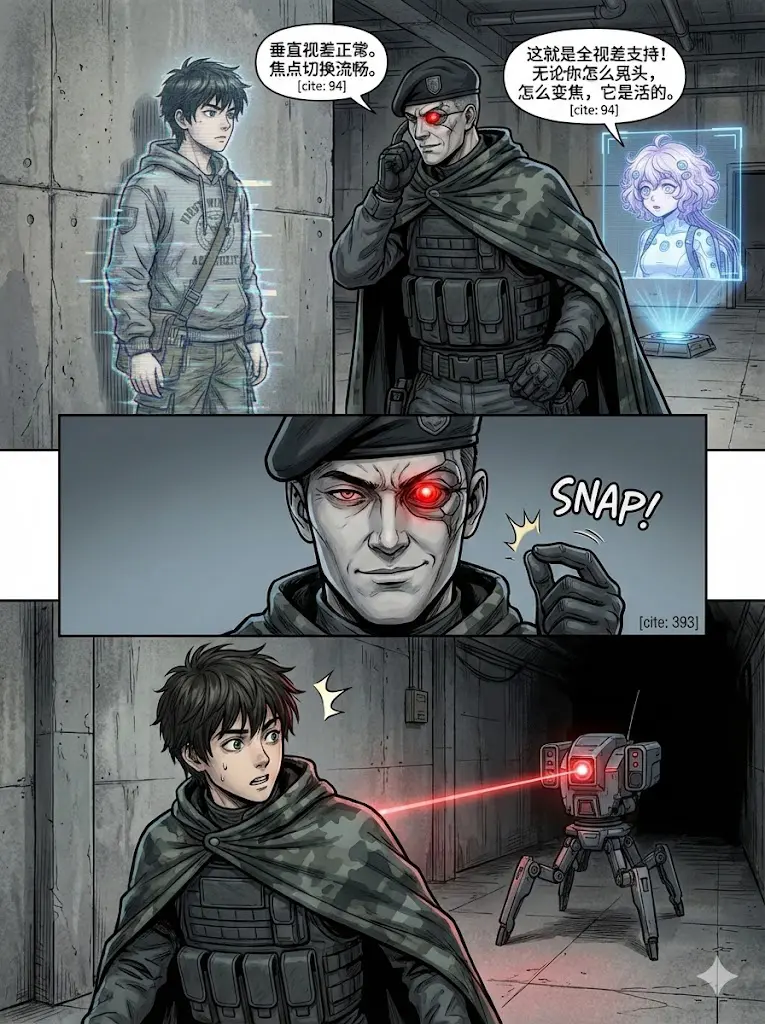
- 超宽视角: 观看角度超过 100°(远超第二代的 40°)。这意味着敌人即使在大范围内快速移动,也无法通过视差变化识破伪装。
- 全视差支持 (Full Parallax): 完美支持水平、垂直、前后移动以及焦点切换时的视差变化。敌人试图通过“晃动头部”或“改变焦距”来破除隐身将完全无效。
- 高保真 (Photorealistic): 在特定视角下,图像清晰度达到视网膜级 (1080p+ @ 50Hz),与真实环境无缝融合。
4.4 战术弱点:多目标算力饱和
- 单挑无敌,群殴吃力: EyeReal 的核心是“集中资源服务特定视角”。
- 饱和攻击风险: 如果士兵同时暴露在多个分散角度的敌人视野中(例如被包围),系统必须将 SBP 带宽撕裂分配给不同方向,导致每个方向的成像质量急剧下降,隐身效果可能瞬间崩溃。
5. 技术演进总结表
| 特性 | 第一代 (G1) | 第二代 (G2) | 第三代 (G3) |
|---|---|---|---|
| 技术代号 | Rigid Shield | Tensor Cloak | EyeReal Skin |
| 核心算法 | 数值迭代 (Iterative) | 端到端 CNN (Tensor Holography) | 动态 SBP 优化 (AI Scheduling) |
| 输入数据 | 光场阵列 | RGB-D (颜色 + 深度) | 威胁位置 + 环境光场 |
| 视角 (FOV) | 窄 (<30°) | 中 (30°-50°) | 超广角 (>100°) |
| 视差能力 | 仅水平视差 | 水平 + 深度遮挡 | 全视差 (含垂直/焦点) |
| 硬件结构 | 背光 + 堆叠 LCD (减法) | 堆叠透明 OLED (加法) | OLED + 相位 LCD (混合) |
| 致命弱点 | 延迟高、不能动 | 视角窄、侧面穿帮 | 多目标包围时失效 |