继世界模型和JEPA架构之后,AI的下一个前沿是什么?答案是:给AI一个"身体"!从虚拟助手到真实世界的智能代理,具身智能正在重新定义人工智能的边界。
之前讨论过世界模型和JEPA架构, 它们让AI拥有了理解世界的"大脑",能够预测和推理。但仅有"大脑"够吗?
如果一个人从来没见大海, 只能通过文字和图片了解游泳,永远无法下水感受浮力、水阻和节奏,你真的会游泳吗?
这正是当前AI面临的困境:它们拥有强大的计算能力和知识储备,却缺乏与物理世界直接交互的"身体"。具身智能(Embodied AI)正是为了解决这一根本性问题而诞生的。Embodied AI 将智能融入物理系统,如机器人、自动驾驶汽车和无人机,使其能够实时感知、学习并与现实世界互动。这种方法不仅扩展了 AI 的应用范围,还让我们更接近于创造出能像人类一样理解和适应环境的智能机器。
一、什么是具身智能?
具身智能 (Embodied AI) 指的是将人工智能嵌入物理实体,使其能够通过传感器感知环境、通过执行器采取行动,并从与环境的互动中学习。传统 AI 通常在抽象的数字环境中运行,依赖大量标注数据和预定义规则。而 Embodied AI 则强调物理存在和实时互动的重要性,认为智能不仅是计算的结果,还深深植根于身体与环境的交互。
这一理念最早可追溯到 1991 年 Rodney Brooks 的论文《无需表征的智能》(Intelligence without representation),他提出智能行为可以直接从自主机器与环境的简单物理交互中产生,而无需复杂的算法或内部表征。1999 年,Rolf Pfeifer 和 Christian Scheier 在《理解智能》中进一步指出,智能是代理整个身体结构和功能的综合体现,而非仅限于大脑或算法。2005 年,Linda Smith 提出的“具身假设”强调,认知过程通过身体与环境的持续互动形成。
具身智能的核心在于其物理载体的多样性,包括机器人、无人机、VR/AR系统等各种形态。这些系统具备多模态感知能力,能够同时处理视觉、听觉、触觉和本体感觉信息。更重要的是,它们能够主动与环境交互,不仅接收信息,还能改变环境并从反馈中学习,通过这种持续的感知-行动循环不断优化自身的行为策略。
为什么"身体"如此重要?
传统AI就像一个"书房里的学者",虽然拥有海量知识和超强的计算能力,但缺乏实践经验。相比之下,具身智能更像一个"实践家",它能在真实世界中行动,通过感官直接感知环境,与周围环境进行动态交互,并从每一次错误中快速学习和改进。
生动比喻:学开车时,你可以把交规背得滚瓜烂熟,但真正的驾驶技能只能通过实际操作方向盘、踩油门刹车来获得。同样,AI要真正理解世界,就需要"亲身体验"。
二、具身智能的技术架构
具身智能的设计基于四个关键原理:物理互动、经验学习、世界建模和具身性适配。系统通过传感器感知环境,通过执行器执行动作,在这种感知-行动循环中不断学习和改进。为了有效决策,系统需要构建环境的内部表征(世界模型),而其物理形态会直接影响学习和执行能力。
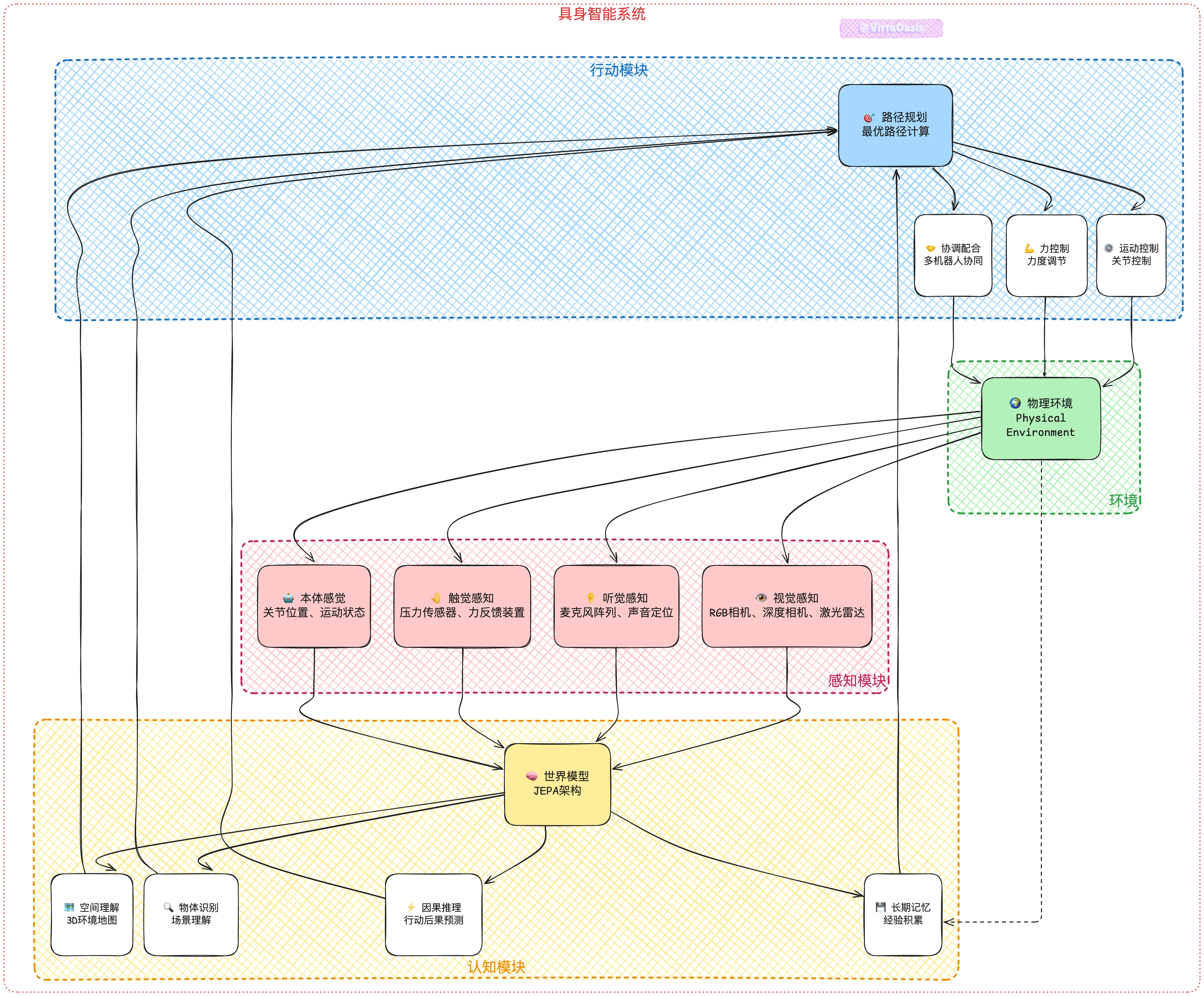
这个架构展示了具身智能系统的完整结构:感知模块作为系统的"感官",认知模块作为"大脑",行动模块作为"手脚",三者与环境形成一个完整的智能循环。
感知-认知-行动的闭环系统
具身智能的核心是一个持续运行的感知-认知-行动闭环系统。这个系统从环境感知开始,通过认知处理,最终产生行动,并通过反馈学习不断优化。
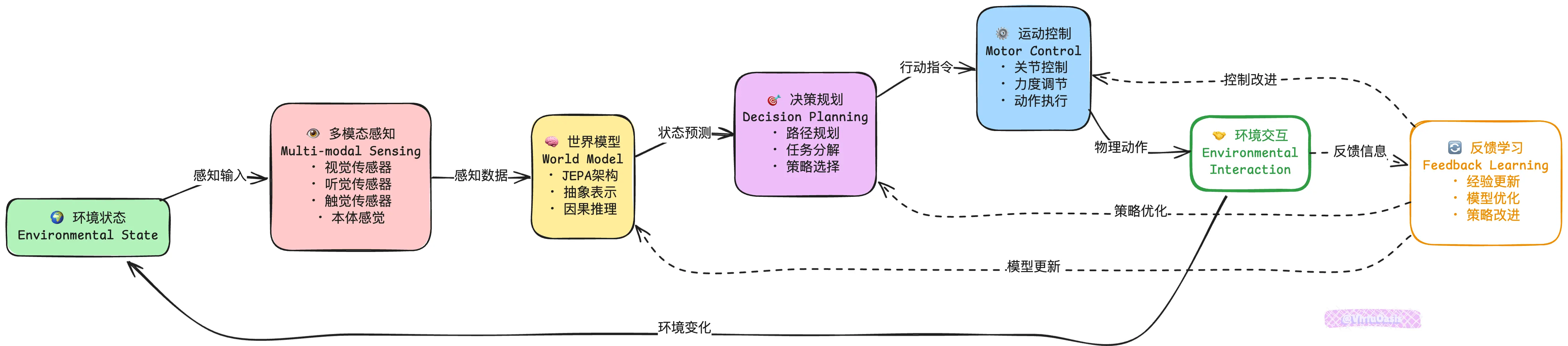
这个闭环系统的每个环节都至关重要。感知模块作为系统的"眼睛和耳朵",通过RGB相机、深度相机、激光雷达等设备进行视觉感知,通过麦克风阵列实现听觉感知和声音定位,还配备压力传感器和力反馈装置进行触觉感知,以及关节位置和运动状态的本体感觉。
认知模块是系统的"大脑",这里正是我们之前介绍的世界模型和JEPA发挥作用的地方。它负责构建3D环境地图以理解空间结构,识别和理解场景中的各种物体,通过因果推理预测行动的后果,并建立长期记忆来积累经验和知识。
行动模块则是系统的"手脚",负责将认知转化为具体行动。它能够规划从当前位置到目标的最优路径,精确控制机械关节和末端执行器,根据任务需求调节力度,并在多机器人系统中实现协调配合。
最关键的是反馈学习机制,它使系统能够从每次交互中学习,不断优化世界模型、改进决策策略和提升控制精度。
具身智能与世界模型的融合
还记得JEPA架构的核心思想吗?通过预测抽象表示来理解世界规律。在具身智能中,这一理念得到了完美体现:
传统方式:
感知数据 → 处理分析 → 输出决策
具身智能+JEPA方式:
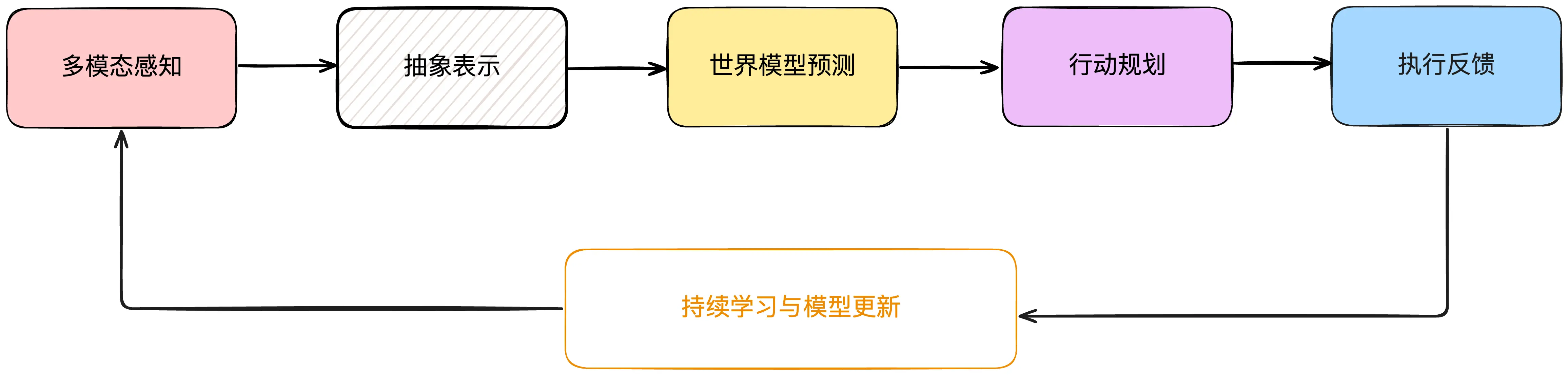
这种融合带来三大关键优势:首先是预测性交互,系统能够在采取行动前预测可能的结果;其次是自适应学习,通过每次交互持续改进自身性能;最重要的是深度的世界理解,系统能够构建对物理世界运行规律的深层认知。
三、具身智能的核心能力
1 物理智能(Physical Intelligence)
物理智能是指理解并利用物理世界规律完成任务的能力。这种能力体现在多个方面:系统能够像人类一样灵巧地使用各种工具,精确控制施加的力量大小,理解三维空间中复杂的几何关系,并能动态适应环境变化和处理不确定性。
在实际应用中,我们已经看到了令人瞩目的成果。Boston Dynamics的Atlas机器人展现了惊人的运动能力,能够完成跑酷、后空翻等高难度动作。Tesla的Optimus机器人已经学会了叠衣服、整理物品等日常任务。而Figure公司的Figure-01机器人则在工厂环境中展现了精密装配的能力。
2 社交智能(Social Intelligence)
社交智能使具身智能系统能够与人类进行自然有效的互动。这包括通过语言、手势和表情进行多模态交流,理解和适当表达情感,以及遵守相应的社交礼仪和文化习俗。这种能力让机器人能够真正融入人类社会,在酒店前台担任接待员,在餐厅提供贴心服务,或在家庭中为老人提供护理和陪伴,为儿童提供个性化教育。在工业环境中,具备社交智能的协作机器人能够与工人安全协作,提升整体工作效率。
3 学习智能(Learning Intelligence)
学习智能是具身智能系统的核心优势之一。这些系统能够将每次与环境的交互都转化为学习机会,从经验中不断改进自身性能。它们具备在线适应能力,能够实时调整策略以应对新情况。更重要的是,它们能够将在一个场景中学到的技能泛化应用到新的场景中,甚至具备元学习能力——即学会如何更好地学习,不断优化自身的学习策略和效率。
四、具身智能的应用
Embodied AI 的应用范围广泛,涵盖多个行业,以下是一些典型案例:
-
机器人技术:在制造业中,Embodied AI 驱动的机器人可以执行复杂的装配任务;在医疗领域,服务机器人能协助护理或康复。例如,Boston Dynamics 的机器人(如 Spot)利用 Embodied AI 在复杂地形中导航 (NVIDIA: Embodied AI)。
-
自动驾驶车辆:自动驾驶汽车(如 Waymo 或 Tesla 的车辆)依赖 Embodied AI 实时感知道路状况、避开障碍物并做出驾驶决策 (Wayve: The Road to Embodied AI)。
-
智能家居与物联网:Embodied AI 使智能设备(如扫地机器人)能够更智能地适应用户需求。例如,机器人吸尘器使用简化的 Embodied AI 导航家居环境 (Live Science: What is embodied AI?).
-
辅助技术:为老年人或残疾人设计的机器人利用 Embodied AI 提供个性化帮助,如搬运物品或引导行动。
以下表格总结了 Embodied AI 的主要应用领域及其特点:
| 应用领域 | 特点 | 示例 |
|---|---|---|
| 机器人技术 | 执行复杂任务,适应动态环境 | Boston Dynamics 的 Spot 机器人 |
| 自动驾驶车辆 | 实时导航、障碍物检测和决策 | Waymo、Tesla 自动驾驶汽车 |
| 智能家居 | 响应用户需求,优化设备行为 | 扫地机器人、智能音箱 |
| 辅助技术 | 提供个性化支持,增强生活质量 | 助老助残机器人 |
五、技术挑战与突破方向
当前面临的主要挑战
感知融合是具身智能面临的首要挑战。系统需要有效整合来自视觉、听觉、触觉等多个传感器的信息,并在复杂环境中实时处理大量数据,同时还要应对各种信号干扰和噪声。这要求系统具备强大的数据处理能力和鲁棒的算法设计。
运动控制精度是另一个关键挑战。要达到人类手指般的灵巧操作水平,系统必须在力量控制上做到既有力又精准,并在高速运动中保持动态平衡。这需要在机械设计、传感器精度和控制算法等多个层面实现突破。
学习效率问题也不容忽视。当前的具身智能系统往往需要大量训练数据才能掌握新技能,在面对新环境时适应速度较慢,而且容易出现"灾难性遗忘"——学习新任务时丢失已掌握的旧技能。
最后,安全可靠性是具身智能系统实际部署的关键考量。系统必须具备完善的故障安全机制,确保行为的可预测性,并严格遵循机器人伦理准则,这对于获得公众信任和实现大规模应用至关重要。
突破方向
感知技术的升级是突破的重要方向。研究者们正在开发模拟生物神经系统的新型传感器,通过边缘计算技术在传感器端直接进行智能处理,并探索更深层次的多传感器信息融合方法,以提升系统的感知能力和处理效率。
AI算法的创新同样关键。强化学习算法使系统能够通过试错快速掌握新策略,模仿学习让系统可以从人类示范中直接学习技能,而持续学习算法的发展将解决"灾难性遗忘"问题,实现真正的终身学习。
硬件平台的优化也不可忽视。专门为机器人应用设计的AI芯片将大幅提升计算效率,能耗优化技术将延长系统续航时间,而仿生设计理念将借鉴生物的高效结构,让机器人的物理形态更加优化。
Embodied AI 将智能根植于物理互动,它让我们更接近于创造能够像人类一样理解和适应世界的机器。从机器人到自动驾驶,Embodied AI 正在重塑我们的技术景观。尽管面临安全和伦理等挑战,其潜力无疑是巨大的。随着研究的深入,Embodied AI 将为各行各业带来革命性变化,开启智能机器的新时代。
📝 作者注:本文是世界模型系列文章的第三篇,前两篇分别介绍了世界模型的基本概念和JEPA架构的技术细节。三篇文章构成了从理论到实践的完整体系,展现了AI向通用智能演进的清晰路径。
🔗 相关阅读:
- 世界模型与JEPA架构:重新定义AI理解世界的方式
- JEPA深度解析:Yann LeCun如何让AI真正"理解"世界?