缘起
我做了关于PID的漫画后,有读者回复说可以继续再讲讲“自抗扰控制”。这是我之前完全没听说过的知识,于是就想测试一下学习。我的目的也不高,就是大致了解这是怎么回事,建立直观的印象,理解其大致的原理,反正日后需要具体实现用的时候可以让AI帮我写程序。
整个流程大致是:
- 画个漫画 → 2.让AI写示例代码 → 3. 让AI详细讲解代码 → 4. 画出数据流程图 → 5. 追问细节 → 6. 让AI出个习题
画个漫画




代码
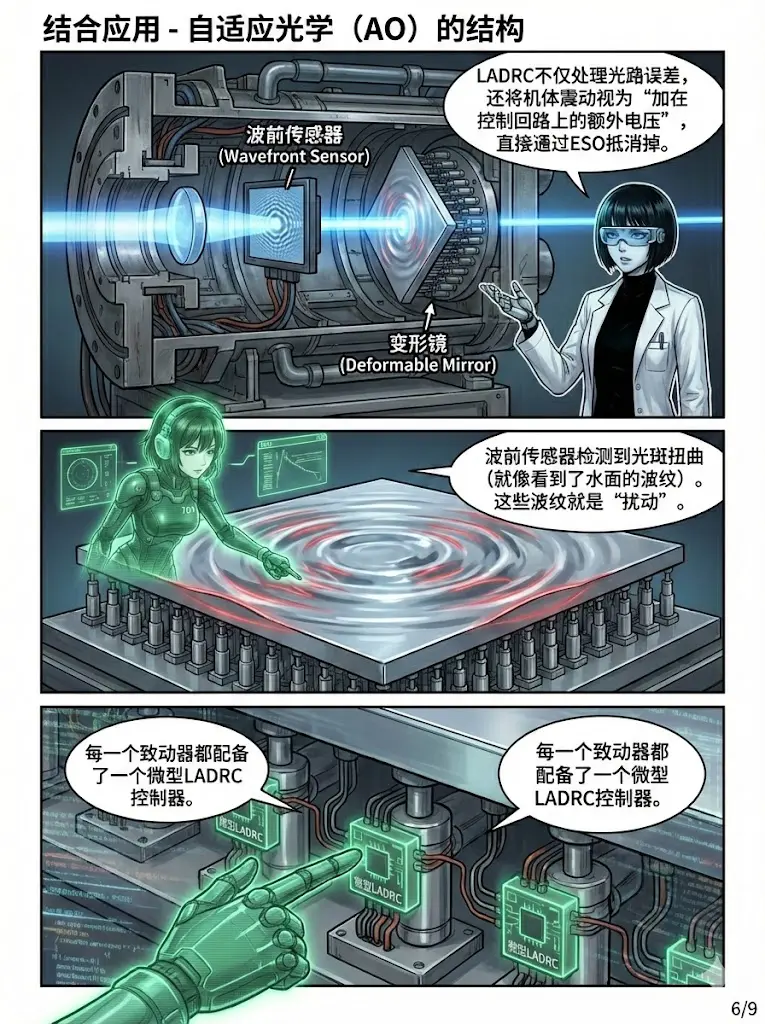
我仍然不太明白这个漫画中的讲解。请为我写一个wolfram示例,比如我们有一个点光源,有两枚控制光路的反射镜,将点光源发出的光汇聚到目标点上,有一个观测结构,可以测量出在目标点上两个反射镜反射的光点位置。用LADRC应该如何调整呢?有必要的话,我们还可以加入一个干扰源,比如光线传播路径上还有一个其他的按时间变化的东西,例如厚度按sin(t)变化的结构或者其他合适的干扰源。
这是一个非常棒的要求。为了让你真正理解LADRC(线性自抗扰控制)是如何工作的,我们将编写一个完全自包含的Wolfram Language程序。
这个程序将模拟你描述的场景:
- 物理系统:双轴控制系统(模拟两个反射镜或一个Tip-Tilt变形镜),控制光斑在X-Y平面上的位置。
- 干扰源:一个随时间变化的“正弦波干扰”(模拟大气湍流或光路上的周期性振动)+ 随机噪声。
- 控制器:LADRC控制器,它将尝试抵消干扰,将光斑锁定在原点 。
核心逻辑说明 (对应漫画概念)
- 总扰动 (Total Disturbance, ): 包含了我们人为加入的正弦波干扰,以及系统本身的惯性。
- ESO (扩张状态观测器): 代码中的核心函数。它不看具体的干扰源是什么,只看“预测位置”和“实际位置”的差值,反推由于干扰导致了多少偏差 ()。
- 控制律: 。把估算出的 减掉,从而在数学上把系统变成一个简单的积分器。
Wolfram Language 代码
ClearAll["Global`*"];
(* ========================================================== *)
(* 1. 核心算法定义 (优化版) *)
(* ========================================================== *)
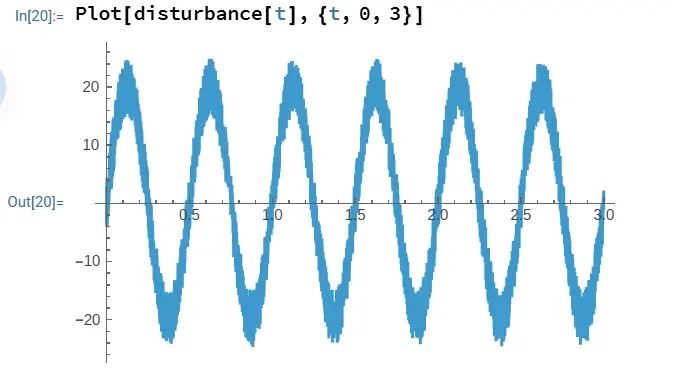
(* 干扰源:为了在短时间内看清效果,我们让频率稍微快一点 *)
disturbance[t_] := 20.0 * Sin[2.0 * Pi * 2.0 * t] + (* 2Hz 主震动 *)
RandomReal[{-5, 5}]; (* 噪声 *)
(* LADRC初始化 *)
createLADRC[wc_, wo_, b0_, dt_] := <|
"z1" -> 0., "z2" -> 0., "z3" -> 0.,
"b0" -> b0, "dt" -> dt,
"beta1" -> 3 * wo, "beta2" -> 3 * wo^2, "beta3" -> wo^3,
"kp" -> wc^2, "kd" -> 2 * wc
|>;
(* LADRC 单步更新函数 - 保持原逻辑不变 *)
stepLADRC[ctrl_, yMeasured_, setpoint_] :=
Module[{z1, z2, z3, e, u0, u, dt, b0, beta1, beta2, beta3, kp, kd,
newZ1, newZ2, newZ3},
{z1, z2, z3, dt, b0} = Lookup[ctrl, {"z1", "z2", "z3", "dt", "b0"}];
{beta1, beta2, beta3, kp, kd} = Lookup[ctrl, {"beta1", "beta2", "beta3", "kp", "kd"}];
e = z1 - yMeasured;
u0 = kp * (setpoint - z1) - kd * z2;
u = (u0 - z3)/b0; (* 核心:减去估算的扰动 z3 *)
(* ESO 更新 *)
newZ1 = z1 + dt * (z2 - beta1 * e);
newZ2 = z2 + dt * (z3 - beta2 * e + b0 * u);
newZ3 = z3 + dt * (-beta3 * e);
{<|ctrl, "z1" -> newZ1, "z2" -> newZ2, "z3" -> newZ3|>, u}
];
(* ========================================================== *)
(* 2. 高速仿真循环 (使用 Reap/Sow) *)
(* ========================================================== *)
(* 参数设置 *)
T = 3.0; (* 缩短为3秒,足以看清稳定过程 *)
dt = 0.01; (* 步长 10ms,云端运行更轻松 *)
steps = Round[T/dt];
b_true = 10.0; (* 物理系统增益 *)
wc = 15.0; (* 控制器带宽 *)
wo = 80.0; (* 观测器带宽 *)
(* 运行仿真并收集数据 *)
(* Reap 负责收集 Sow 种下的数据,这是云端运行的关键优化 *)
simulationResult = Reap[
(* 初始化变量 *)
ctrlX = createLADRC[wc, wo, b_true, dt];
state = <|"x" -> 0., "vx" -> 0., "x_ol" -> 0., "vx_ol" -> 0.|>;
Do[
t = i * dt;
dist = disturbance[t];
(* --- 1. LADRC 控制 --- *)
{ctrlX, u} = stepLADRC[ctrlX, state["x"], 0.0];
(* --- 2. 物理演化 --- *)
(* 闭环 (有控制) *)
acc = b_true * u + dist;
state["x"] += state["vx"] * dt;
state["vx"] += acc * dt;
(* 开环 (无控制,只有干扰) *)
acc_ol = dist;
state["x_ol"] += state["vx_ol"] * dt;
state["vx_ol"] += acc_ol * dt;
(* --- 3. 收集数据 (高速) --- *)
(* 格式: {t, 闭环X, 开环X, 估算扰动z3, 真实扰动f} *)
Sow[{t, state["x"], state["x_ol"], ctrlX["z3"], dist}];
, {i, 1, steps} (* 循环结束 *)
];
][[2, 1]]; (* 提取 Reap 的结果列表 *)
(* 转换数据列以便绘图 *)
dataT = simulationResult[[All, 1]];
dataX = simulationResult[[All, 2]]; (* LADRC *)
dataOL = simulationResult[[All, 3]]; (* Open Loop *)
dataZ3 = simulationResult[[All, 4]]; (* Estimated Disturbance *)
dataF = simulationResult[[All, 5]]; (* Real Disturbance *)
(* ========================================================== *)
(* 3. 结果可视化 *)
(* ========================================================== *)
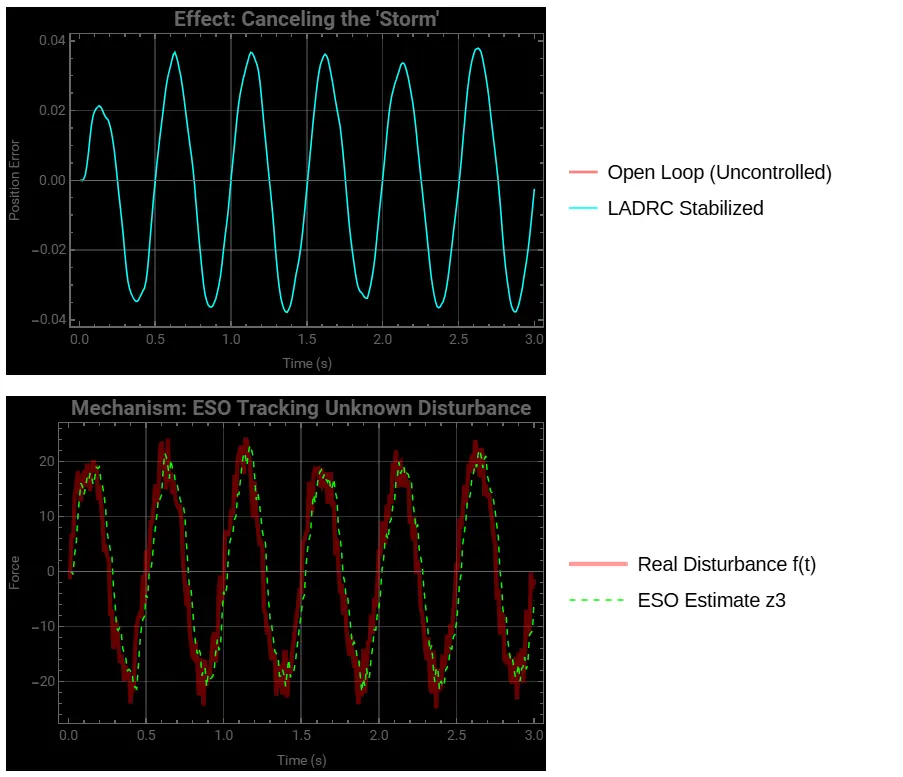
(* 图1: 控制效果对比 *)
p1 = ListLinePlot[{
Transpose[{dataT, dataOL}],
Transpose[{dataT, dataX}]
},
PlotStyle -> {
{Red, Opacity[0.5], Thickness[0.005]}, (* 开环:红色乱晃 *)
{Cyan, Thickness[0.003]} (* LADRC:青色稳定 *)
},
PlotLegends -> {"Open Loop (Uncontrolled)", "LADRC Stabilized"},
Frame -> True, FrameLabel -> {"Time (s)", "Position Error"},
PlotLabel -> Style["Effect: Canceling the 'Storm'", Bold, 14],
GridLines -> Automatic, Background -> Black,
BaseStyle -> {FontFamily -> "Arial", FontColor -> White},
ImageSize -> Medium
];
(* 图2: 观测器能力 (ESO) *)
p2 = ListLinePlot[{
Transpose[{dataT, dataF}],
Transpose[{dataT, dataZ3}]
},
PlotStyle -> {
{Red, Opacity[0.4], Thickness[0.008]}, (* 真实扰动 *)
{Green, Dashed, Thickness[0.002]} (* ESO估算 *)
},
PlotLegends -> {"Real Disturbance f(t)", "ESO Estimate z3"},
Frame -> True, FrameLabel -> {"Time (s)", "Force"},
PlotLabel -> Style["Mechanism: ESO Tracking Unknown Disturbance", Bold, 14],
GridLines -> Automatic, Background -> Black,
BaseStyle -> {FontFamily -> "Arial", FontColor -> White},
ImageSize -> Medium
];
(* 输出 *)
Column[{p1, p2}, Spacings -> 1]
代码讲解 (硬核补习班风格)
1. 模拟的场景
我们建立了一个 disturbance[t] 函数。想象这个函数就是漫画里“雷锤”抱怨的引擎共振和外面的暴风雨。它由不同频率的正弦波组成,让光路发生偏移。
2. ESO 的魔法 (stepLADRC 中的逻辑)
请注意代码中的 z3。
- 我们并没有告诉ESO干扰是正弦波。
- ESO只是不断比较
z1(估算位置) 和yMeasured(传感器读数)。 - 如果发现
yMeasured跑得比预期快,ESO 就会认为:“肯定有个外力在推它!” - 它把这个“推测出的外力”存入
z3。 - 看图表2 (右上角):你会惊讶地发现,绿色的虚线(ESO估算值)几乎完美地覆盖了红色的实线(真实干扰)。这就是漫画里 \mu 说的“看见了总扰动”。
3. 控制器的反击
在 u = (u0 - z3)/b0 这一行。
- 一旦 ESO 算出了
z3(比如干扰是 +20),控制器就在输出电压里减去对应的量。 - 结果 (图表1 左上角):红色的线是“关掉LADRC”时的光斑,它像疯了一样乱跑(被干扰推着走)。蓝色的线是“开启LADRC”后的光斑,它被紧紧锁死在原点附近。
4. 为什么这适合自适应光学?
- 在自适应光学中,大气湍流是随机且高频的。传统的 PID 需要积分器
I来消除误差,但积分器有滞后(必须先积累误差)。 - LADRC 通过 ESO 直接观测干扰的变化趋势,在误差积累变大之前就进行了抵消。这就是为什么蓝线能保持如此平稳的原因。
如何运行
将此代码复制并在 Wolfram Cloud 或本地 Mathematica 中运行。你会看到全黑背景的工业风图表,直观展示 LADRC 如何将狂暴的干扰驯服为静止的点。
代码讲解
现在请一点一点为我讲解这个程序代码,我对wolfram语言也不熟悉。请耐心些
没问题。Wolfram Language (Mathematica) 的语法非常独特,它更像是在写数学公式,而不是像 C++ 或 Python 那样写指令。
为了让你完全理解,我们将这段代码像“拆解一台精密仪器”一样,分成五个模块来讲解。我会尽量用自然语言配合编程概念来解释。
模块一:起手式与“制造敌人”
ClearAll["Global`*"];
- 解释:这是Wolfram程序的标准开头。
- 作用:清除内存中以前定义的所有变量。就像把黑板擦得干干净净,防止以前写的
x = 5干扰现在的计算。
(* 干扰源 *)
disturbance[t_] := 20.0 * Sin[2.0 * Pi * 2.0 * t] + RandomReal[{-5, 5}];
- 语法:
f[x_] := ...是定义函数的标准方式。t_后面的下划线表示t是一个占位符(参数)。:=(SetDelayed) 意味着“每次调用时才计算”,而不是现在就定死。 - 物理含义:这是我们在漫画里提到的“总扰动”中的一部分(外部干扰)。
20.0 * Sin[...]:一个振幅为20、频率为2Hz的有规律震动(模拟引擎共振)。RandomReal[{-5, 5}]:一个随机的噪声(模拟风或大气湍流)。
- 形象理解:这就是那个不断推搡反射镜的“坏蛋”。
模块二:初始化控制器 (打造容器)
createLADRC[wc_, wo_, b0_, dt_] := <|
"z1" -> 0., "z2" -> 0., "z3" -> 0.,
"b0" -> b0, "dt" -> dt,
"beta1" -> 3 * wo, "beta2" -> 3 * wo^2, "beta3" -> wo^3,
"kp" -> wc^2, "kd" -> 2 * wc
|>;
- 语法:
<| Key -> Value, ... |>。这在 Wolfram 语言中叫 Association (关联)。它非常像 Python 的 Dictionary (字典) 或 JSON 对象。 - 作用:我们将控制器需要的所有东西打包成一个“包裹”。
z1, z2, z3:这是控制器的记忆(状态)。z1是估算位置,z2是估算速度,z3是最重要的估算扰动。初始都设为0。beta1, beta2...:这是根据高志强教授的“带宽参数化法”自动计算出的参数。你只需要给它wo(观测带宽),它自己算出内部需要的系数。
- 形象理解:这就像是叶子(Leaf)在编写代码时,定义了一个名为“LADRC控制器”的结构体(Struct)。
模块三:控制器的思考过程 (核心算法)
这是最复杂的部分,我们逐行看:
stepLADRC[ctrl_, yMeasured_, setpoint_] :=
Module[{z1, z2, z3, e, u0, u, ...}, (* 1. 局部变量声明 *)
(* 2. 提取记忆 *)
{z1, z2, z3, dt, b0} = Lookup[ctrl, {"z1", "z2", "z3", "dt", "b0"}];
{beta1, beta2, beta3, kp, kd} = Lookup[ctrl, {...}];
(* 3. 观测误差 *)
e = z1 - yMeasured;
(* 4. 计算理想控制量 u0 (PD控制) *)
u0 = kp * (setpoint - z1) - kd * z2;
(* 5. 核心一击:抗扰 *)
u = (u0 - z3)/b0;
(* 6. 更新记忆 (ESO) *)
newZ1 = z1 + dt * (z2 - beta1 * e);
newZ2 = z2 + dt * (z3 - beta2 * e + b0 * u);
newZ3 = z3 + dt * (-beta3 * e);
(* 7. 返回结果 *)
{<|ctrl, "z1" -> newZ1, "z2" -> newZ2, "z3" -> newZ3|>, u}
];
Module[{...}, ...]:这就好比在函数内部划定了一个“私有工作区”,这里的变量(如u)用完就扔,不会污染外面的环境。Lookup:从刚才那个“包裹”里把数据取出来。e = z1 - yMeasured:ESO(观测器)看了一眼自己的预测 (z1) 和现实 (yMeasured) 差了多少。u = (u0 - z3)/b0:全篇代码的灵魂。u0是我们想要怎么走。z3是 ESO 发现的“捣乱的力”。- 我们直接在指令里减去
z3。如果风往右吹 (+20),我们就往左使劲 (-20)。这在数学上就把干扰抵消了。
newZ...:这是根据欧拉法(Euler Integration)预测下一时刻的状态,为下一次循环做准备。- 返回值:函数最后输出两样东西:
{更新后的控制器包裹, 这一刻该输出的电压 u}。
模块四:仿真循环 (时间流逝)
这里有一个为了在云端运行而优化的特殊技巧:Reap 和 Sow。
simulationResult = Reap[
(* ... 初始化代码 ... *)
Do[
t = i * dt;
dist = disturbance[t];
(* ... 物理计算 ... *)
(* 收集数据 *)
Sow[{t, state["x"], state["x_ol"], ctrlX["z3"], dist}];
, {i, 1, steps} (* Do 循环结束 *)
];
][[2, 1]];
Do[..., {i, 1, steps}]:这是标准的循环,i从 1 走到steps。Sow[...](播种):在 Mathematica 中,如果你用AppendTo向一个列表里添加数据,随着列表变长,速度会越来越慢(因为要复制内存)。Sow就像是农夫播种,它只管把数据“扔”出去,速度极快。Reap[...](收割):它包裹着整个循环。等循环跑完了,它负责把刚才所有Sow扔出去的数据一次性收集起来,打包成一个列表。- 这对于资源受限的云端环境至关重要,能让代码快几十倍。
在循环内部的物理逻辑很简单:
acc = b_true * u + dist:牛顿第二定律 ()。加速度 = 我们的控制力 + 外部干扰力。state["x"] += state["vx"] * dt:位置 = 旧位置 + 速度 时间。
模块五:可视化 (画图)
p1 = ListLinePlot[{
Transpose[{dataT, dataOL}],
Transpose[{dataT, dataX}]
}, ...];
Transpose:我们的数据本来是按行存的{t, x, ...},Transpose把它转置,变成{t1, t2...}, {x1, x2...},方便画图。ListLinePlot:这是 Wolfram 最强大的绘图函数之一。- 它能直接画出一系列点组成的线。
- 后面的
PlotStyle,Frame等都是装修参数,为了让图表看起来像漫画里那种“高科技工业风”(黑色背景、亮色线条)。
总结:整个程序的流程
- 准备:清理内存,定义干扰函数。
- 设置:创建一个空的控制器(包裹),设定好带宽参数。
- 循环(比如模拟 3 秒钟,每步 0.01 秒):
- 环境:计算当前时刻的风有多大。
- 感知与思考:LADRC 控制器看一眼当前位置,估算干扰 (
z3),计算反击指令 (u)。 - 行动:将
u施加给物理系统,算出下一刻的位置。 - 记录:用
Sow把这一刻的数据扔进篮子。
- 收割:
Reap收集所有数据。 - 展示:把数据画成图表。
数据流动图
这是一个非常敏锐的问题。理解数据流向是读懂程序的关键。
你需要明白三个角色的关系:
- 主循环 (
Do):这是“时间”的管理者,也是数据的搬运工。 stepLADRC函数:这是一个“加工厂”。它不保存数据,它只负责接收旧数据,算出新数据,然后扔回去。simulationResult(Reap/Sow):这是旁边的“记账员”,负责把过程记录下来。
下面我为你画两张图。第一张是宏观的数据循环图,第二张是函数内部的加工流程图。
第一张图:宏观循环 (The Loop)
这张图展示了在 Do 循环的**每一次迭代(i)**中,数据是如何在 ctrlX、物理系统和记账员之间流动的。
graph TD
subgraph Loop [Do Loop 每一次时间步 t]
%% 准备数据
StateNode[当前状态 state] -->|提供 x| InputMeasure(传感器测量值 state_x)
CtrlNode[旧控制器对象 ctrlX] -->|提供记忆 z1 z2 z3| InputCtrl(控制器记忆包)
TargetNode[目标值 0.0] -->|提供 0.0| InputTarget(设定目标)
%% 调用函数
InputCtrl & InputMeasure & InputTarget --> Process{{"调用函数: stepLADRC"}}
%% 函数输出
Process -->|输出 1| NewCtrl(更新后的 ctrlX)
Process -->|输出 2| OutputU(控制电压 u)
%% 物理演化
OutputU --> Physics[物理计算 F=ma]
Disturbance[干扰 disturbance] --> Physics
Physics -->|更新| NewState[下一刻状态 state]
%% 这里的循环 (虚线表示变量被更新覆盖)
NewCtrl -.->|覆盖旧变量| CtrlNode
NewState -.->|覆盖旧变量| StateNode
%% 记账 (Sow)
OutputU -.-> Record
NewCtrl -.-> Record
StateNode -.-> Record
Disturbance -.-> Record
Record(Sow: 播种数据) -->|扔进篮子| Basket[("Reap buffer (临时篮子)")]
end
%% 循环结束
Basket -->|最终提取| FinalResult[simulationResult]
关键点解析:
-
- 传入 (
Input):stepLADRC需要三个原材料:
- 你是谁 (
ctrlX):包含上一时刻算出的扰动z3等记忆。 - 你在哪 (
state["x"]):当前的物理位置。 - 去哪里 (
0.0):目标位置。
- 传入 (
- 传出 (
Output):函数吐出两个产品:- 新的自己 (
newCtrl):更新了记忆(z1, z2, z3 变了)。代码里用{ctrlX, u} = ...把旧的ctrlX覆盖掉了。 - 动作指令 (
u):这用来驱动物理引擎。
- 新的自己 (
第二张图:微观加工 (Inside stepLADRC)
这张图展示了数据进入函数内部后,具体发生了什么化学反应。这是 LADRC 的核心逻辑。
flowchart LR
%% 输入端
subgraph INPUTS [输入参数]
direction TB
I1[ctrl_: 旧记忆 z1, z2, z3]
I2[yMeasured_: 真实位置]
I3[setpoint_: 目标 0]
end
%% 内部逻辑
subgraph PROCESS [stepLADRC 内部处理]
direction TB
%% 第一步:看误差
I1 & I2 --> NODE1(观测误差 e = z1 - yMeasured)
%% 第二步:算期望控制
I3 & I1 --> NODE2(PD计算 u0 = kp*误差 - kd*速度)
%% 第三步:核心抗扰
NODE2 --> NODE3(计算控制量 u)
I1 --"取旧的 z3"--> NODE3
NODE3 --"u = (u0 - z3) / b0"--> RESULT_U[控制量 u]
%% 第四步:更新记忆 (ESO)
NODE1 & RESULT_U & I1 --> NODE4(ESO 更新公式)
NODE4 --"预测下一刻"--> RESULT_CTRL[新记忆 z1, z2, z3]
end
%% 输出端
INPUTS --> PROCESS
RESULT_U --> OUT1((输出 u))
RESULT_CTRL --> OUT2((输出 ctrl))
对应代码的一步步解析:
我们在主循环里写了这行代码:
{ctrlX, u} = stepLADRC[ctrlX, state["x"], 0.0];
具体的“参数传递”映射关系如下:
| 代码中的参数位置 | 传入的实参 (Main Loop) | 函数内的形参 (Function) | 含义 |
|---|---|---|---|
| 第 1 个 | ctrlX |
ctrl_ |
记忆包。函数第一件事就是用 Lookup 把里面的 z1, z2, z3 拆出来用。 |
| 第 2 个 | state["x"] |
yMeasured_ |
传感器读数。函数用它和内部预测的 z1 做减法,算出 e。 |
| 第 3 个 | 0.0 |
setpoint_ |
目标。函数用它来计算 PD 控制部分 (setpoint - z1)。 |
函数处理完后的“返回”映射关系:
| 函数返回的列表 | 赋值给 (Main Loop) | 发生了什么? |
|---|---|---|
| 第 1 个元素 | ctrlX |
自我更新。函数把计算好的 newZ1... 打包成一个新的 Association,主循环接收它并覆盖旧的 ctrlX。这样下一次循环时,用的就是最新的记忆了。 |
| 第 2 个元素 | u |
执行动作。主循环接收这个数值,把它代入 b_true * u + dist 计算物理加速度。 |
关于 simulationResult
simulationResult 其实是局外人。
- 它不参与计算。
- 在
stepLADRC算出u和ctrlX之后,主循环里有一行Sow[...]。 Sow就像拍快照。它拍下了这一瞬间的时间t、位置x、以及刚刚被stepLADRC算出来的ctrlX["z3"]。- 等几百次循环全部跑完,
Reap把这些快照装订成册,交给了simulationResult。
所以,simulationResult 是事后的实验报告,而 stepLADRC 是实时的操作员。
希望这个逐行拆解能让你看懂这段“魔法咒语”背后的逻辑!Wolfram 语言虽然符号多,但它的核心思
想非常接近数学原本的描述。
追问1:LADRC参数含义
更细节的问题:
createLADRC[wc_, wo_, b0_, dt_] := <|
"z1" -> 0., "z2" -> 0., "z3" -> 0.,
"b0" -> b0, "dt" -> dt,
"beta1" -> 3 * wo, "beta2" -> 3 * wo^2, "beta3" -> wo^3,
"kp" -> wc^2, "kd" -> 2 * wc
|>;
之中,
- z1是位置,z2是速度,如果是其他问题,是否就是z1是系统的输出,z2是输出的一阶导数?
- b0是什么?如何确定?
- 我看几个参数beta1,beta2,beta3是由wo确定的,系数3,3,1,指数1,2,3这是规定的吗?还是根据问题不同会有不同?
- kp, kd是由wc给出的,系数和指数也是规定好的吗?wo是观测带宽,wc是什么?
- 什么是观测带宽?
这五个问题非常硬核,直击 LADRC(线性自抗扰控制)的灵魂。这正是韩京清教授提出ADRC,以及后来高志强教授提出“带宽参数化”(Bandwidth Parameterization)试图解决的核心痛点:让控制理论从“玄学调参”变成“工程科学”。
我们逐一解答,继续用我们之前的机甲/光学系统作为比喻。
1. 到底是什么?
结论:是的。对于二阶系统(最常见的物理系统), 是输出, 是输出的一阶导数。
- (位置):它对应系统的直接输出 。在我们的例子里,就是光斑的位置。
- (速度):它对应输出的变化率 。在我们的例子里,就是光斑移动的速度。
- (总扰动):这是多出来的那个“扩张状态”。在物理上,原本系统只有位置和速度两个状态,但我们人为加了一个 来代表“所有让系统偏离预期的未知力量”(摩擦力、风、模型误差等)。
推广一下:
LADRC 的阶数取决于对象的物理本质。
- 温度控制(一阶系统):加热器功率直接改变温度变化率。此时, 是温度, 就是总扰动。
- 电机/运动控制(二阶系统):力改变加速度(速度的导数)。此时,是位置,是速度,是总扰动。这是最常用的配置。
2. 是什么?如何确定?
结论: 是控制增益(Control Gain),代表“输入对输出的控制能力”。它不需要非常精确。
物理含义:
公式是 。
- 是你施加的电压(比如 1V)。
- 是这一电压能产生多大的加速度。
- 如果是牛顿第二定律 ,那么 大致就是 (质量的倒数)。
如何确定?
- 理论计算:如果你知道反射镜有多重、致动器推力常数是多少,可以直接算出来。
- 实验测试:给系统一个 1V 的阶跃电压,看它加速有多快。
- LADRC的优势:不需要准!
- 假设真实的 是 10。
- 你设 ,完美。
- 你设 或 ,系统依然非常稳定。因为 ESO 会把 的误差也当成“内部扰动”() 给估算出来并抵消掉。
- 工程经验:通常宁可把 设得比真实值大一点点,也不要太小,以防止控制量 过大导致振荡。
3. 的系数 3, 3, 1 是规定的吗?
结论:是的,在“带宽参数化”方法中,这是根据二项式定理死规定的。
数学原理(不用怕):
ESO(观测器)本质上是一个数学方程。为了让这个观测器稳定且好用,我们需要配置它的“极点”(Eigenvalues)。
高志强教授提出:与其去凑三个复杂的参数,不如让观测器的所有极点都落在同一个位置 。
数学上,一个三阶方程如果有三个重根 ,它的特征多项式就是:
对比我们的 ESO 方程特征式:
一一对应,你就得到了:
意义:这把原本复杂的极点配置问题,简化成了一个旋钮——。你只需要调这一个数,剩下的系数自动就是最优比例。
4. 的系数和指数也是规定的吗? 是什么?
结论:是的,同样源于二项式定理。 是控制器带宽。
控制律使用的是 PD(比例-微分)控制:。
我们希望闭环控制系统的行为像一个标准的二阶系统,且没有超调(Critically Damped)。
数学上,这意味着闭环传递函数的两个极点都放在 。
对比标准二阶系统方程 ,得到:
(Controller Bandwidth) 是什么?
它决定了系统听话的速度。
- 越大,系统对指令的反应越快(从 0 跑到 1 需要的时间越短)。
- 但如果 太大,超过了硬件的极限(比如电机转不了那么快,或者采样率跟不上),系统就会震荡甚至炸机。
5. 什么是观测带宽 ()?
结论:它是 ESO “这只眼睛”的刷新率和敏锐度。
-
形象比喻:
- (控制器) 是你的手速。你希望手越快越好,能迅速把车摆正。
- (观测器) 是你的眼速(或者大脑处理视觉信号的速度)。
-
关系:
- 眼睛必须比手快! 如果你手很快,但眼睛这秒钟才看到上一秒的路况,你一定会翻车。
- 通常规定:。
- 也就是说,ESO 的估算速度,必须比控制器的调节速度快一个数量级,这样控制器拿到 时,它才是“新鲜”的、准确的。
-
副作用:
- 既然 越快越好,为什么不设成无限大?
- 因为 越大,对噪声(Noise)越敏感。
- 如果 太大,传感器里一点点随机的电磁噪声(Random Noise)都会被当成“巨大的扰动”,导致电机疯狂抖动。
- 所以,调参就是在“反应速度”和“抗噪能力”之间找平衡。
总结表格
| 参数 | 全称 | 作用 | 设定依据 |
|---|---|---|---|
| 系统增益估值 | 告诉控制器力气有多大 | 物理估算,宁大勿小 | |
| 控制器带宽 | 决定系统反应多快 (手速) | 根据任务需求,不能超过硬件极限 | |
| 观测器带宽 | 决定扰动估算多快 (眼速) | 通常设为 倍的 | |
| ESO增益 | 保证观测器收敛 | 自动计算 () | |
| 控制器增益 | 保证控制平稳无超调 | 自动计算 () |
这就是 LADRC 的美妙之处:虽然内部数学(状态空间、极点配置)很复杂,但最终暴露给用户的,只有 (物理属性)、(想跑多快)和 (观测多快)这三个直观的参数。
追问2:
(* ESO 更新 *)
newZ1 = z1 + dt * (z2 - beta1 * e);
newZ2 = z2 + dt * (z3 - beta2 * e + b0 * u);
newZ3 = z3 + dt * (-beta3 * e);
这里是如何得到newZ1, newZ2, newZ3的?为何是这样的公式?newZ1, newZ2, newZ3是什么?后续如何使用?
这三行代码是 LADRC 的心脏——扩张状态观测器 (ESO) 的离散化实现。
为了让你彻底明白,我们得把这层窗户纸捅破。这里面包含了三个层面的逻辑:
- 物理模型(世界原本是怎么运作的?)
- 观测器原理(我们怎么去猜这个世界?)
- 数值计算(怎么把数学公式写成计算机代码?)
1. 物理模型:世界原本的样子
在 ESO 的眼里,它假设这个系统(光路控制)遵循以下规律:
- 位置变化率 = 速度
- 速度变化率 = 加速度。而加速度由两部分组成:总扰动 () + 我们的控制力 ()。
- 总扰动变化率 = 未知(假设它是某个导数 ,但在离散的一瞬间可以假设它基本不变)。
这就是我们试图追踪的“真理”。
2. 观测器原理:预测 + 修正
ESO 的工作原理就像是一个带 GPS 导航的司机。
- 是司机脑子里的预测路线。
- 是 GPS 告诉司机的真实位置。
- 是预测误差(司机发现自己偏离了 GPS 显示的位置)。
ESO 的核心逻辑公式(连续形式)如下:
第一行:位置的观测 ()
- :根据当前速度,我预测下一秒位置会变。
- :修正项。
- 如果 (说明我预测的位置 比实际 跑得远了),那么 就是负数,把我的预测往回拉。
- 这就是负反馈。
第二行:速度的观测 ()
- :我认为有一个干扰力在推我。
- :我知道我踩了油门 (),这会让我加速。
- :修正项。如果位置算错了,说明我速度也算错了,赶紧修。
第三行:扰动的观测 () —— 最天才的一步
- 逻辑:模型里本来没有 的来源(我们不知道风从哪吹)。
- 推理:如果你发现即使修正了位置和速度,预测值 依然和真实值 有偏差(),那肯定是有一个未知的“鬼”(扰动)在作祟!
- ESO 直接把这个“位置偏差”通过积分(累加)转化为了“扰动估算值”。
- 这就是为什么 ESO 能算出未知的干扰:它把所有的“算不准”都归结为 。
3. 数值计算:从数学到代码 (Euler Method)
计算机不能处理连续的微积分 ,它只能一步一步算(时间步长 dt)。
我们使用最简单的欧拉法 (Euler Method):
现在对照你的代码:
代码行 1
(* 物理意义:下刻位置 = 当前位置 + dt * (速度 - 修正) *)
newZ1 = z1 + dt * (z2 - beta1 * e);
这直接对应 。
代码行 2
(* 物理意义:下刻速度 = 当前速度 + dt * (扰动 + 控制力 - 修正) *)
newZ2 = z2 + dt * (z3 - beta2 * e + b0 * u);
注意:这里用了 (当前估计的扰动) 和 (控制力) 来推算速度的变化。对应 。
代码行 3
(* 物理意义:下刻扰动 = 当前扰动 + dt * (- 修正) *)
newZ3 = z3 + dt * (-beta3 * e);
对应 。这一步使得 不断逼近真实的扰动 。
newZ1, newZ2, newZ3 是什么?
它们是 “下一时刻()” 系统的状态估计值。
- newZ1: 预测 10ms 后的光斑位置。
- newZ2: 预测 10ms 后的光斑移动速度。
- newZ3: 预测 10ms 后的总扰动大小(风力+摩擦+震动)。
后续如何使用?
在代码的结尾,你会看到这行(或者类似的返回结构):
<|ctrl, "z1" -> newZ1, "z2" -> newZ2, "z3" -> newZ3|>
这步操作叫做 “更新记忆”。
- 闭环迭代:
当前的stepLADRC函数执行完毕后,这三个新值会被存入ctrlX结构体中。 - 下一轮循环:
当Do循环进行到i+1次,再次调用stepLADRC时:- 今天的
newZ就变成了明天的oldZ。 - ESO 基于这些更新后的值,再次和新的传感器数据对比,继续修正。
- 今天的
- 产生控制:
最关键的用法是在下一轮计算控制量 时:
控制器会直接调用这个刚刚算出来的newZ3,把它从控制信号里减掉。
总结:
这三行公式就是 ESO “通过不断反省自己的预测误差,从而猜出外界干扰” 的数学实现过程。
练习
请给我出一个小的例题,我来编程试试能否解决
这就对了!动手写代码是理解控制算法最好的方式。
既然你已经掌握了基本的 LADRC 结构,我们来做一个稍微有点物理背景的练习题。
📝 练习题:不知情的“电梯” (The Ignorant Elevator)
场景描述:
你正在控制一台垂直升降的货运电梯。
- 物理对象:电梯轿厢,质量 。
- 环境:地球重力 (方向向下)。
- 控制量:电机产生的向上拉力 (牛顿)。
- 目标:将电梯从地面 () 拉升到 () 处,并稳稳停住。
物理方程:
根据牛顿第二定律 ,即:
或者写成我们在代码里用的标准形式 :
你的任务(挑战点):
最关键的是:请不要告诉控制器有重力存在!
在你的控制器代码里,不要写任何关于 9.8 的数字。你要完全依赖 ESO () 自己去发现“咦?好像有一股神秘的力量在一直把电梯往下拉”。
🛠️ 编程填空
我已经为你准备好了框架,请复制下面的代码,并完成标有 (* TODO: ... *) 的部分。
需要填写的参数提示:
- 干扰函数:除了随机噪声,别忘了加上重力项()。
- :根据 ,系数 应该是多少?
- :控制器以为的增益。你可以设得和 一样,或者稍微大一点。
- :目标高度是多少?
ClearAll["Global`*"];
(* === 1. 定义物理环境 === *)
(* 真实的物理参数 *)
m = 100.0; (* kg *)
g = 9.8; (* m/s^2 *)
(* 干扰函数:包括恒定的重力和随机风力 *)
disturbance[t_] := (* TODO: 在这里填空。提示:重力向下(-g) + 随机数 *)
0.0; (* 先写个0占位,请修改我 *)
(* === 2. LADRC 核心 (直接复用之前的,不用改) === *)
createLADRC[wc_, wo_, b0_, dt_] := <|
"z1" -> 0., "z2" -> 0., "z3" -> 0.,
"b0" -> b0, "dt" -> dt,
"beta1" -> 3 * wo, "beta2" -> 3 * wo^2, "beta3" -> wo^3,
"kp" -> wc^2, "kd" -> 2 * wc
|>;
stepLADRC[ctrl_, yMeasured_, setpoint_] :=
Module[{z1, z2, z3, e, u0, u, dt, b0, beta1, beta2, beta3, kp, kd,
newZ1, newZ2, newZ3},
{z1, z2, z3, dt, b0} = Lookup[ctrl, {"z1", "z2", "z3", "dt", "b0"}];
{beta1, beta2, beta3, kp, kd} = Lookup[ctrl, {"beta1", "beta2", "beta3", "kp", "kd"}];
e = z1 - yMeasured;
u0 = kp * (setpoint - z1) - kd * z2;
u = (u0 - z3)/b0;
newZ1 = z1 + dt * (z2 - beta1 * e);
newZ2 = z2 + dt * (z3 - beta2 * e + b0 * u);
newZ3 = z3 + dt * (-beta3 * e);
{<|ctrl, "z1" -> newZ1, "z2" -> newZ2, "z3" -> newZ3|>, u}
];
(* === 3. 运行仿真 === *)
T = 5.0;
dt = 0.01;
steps = Round[T/dt];
(* TODO: 填写参数 *)
b_true = (* TODO: 真实的系统增益 1/m *);
b_est = (* TODO: 控制器估算的增益,可以等于 b_true *);
target = (* TODO: 目标高度 20米 *);
(* 带宽设置 (可以先用这一组,也可以自己调) *)
wc = 5.0;
wo = 30.0;
simulationResult = Reap[
(* 初始化 *)
ctrl = createLADRC[wc, wo, b_est, dt];
state = <|"y" -> 0., "vy" -> 0.|>; (* 从地面 y=0 开始 *)
Do[
t = i * dt;
(* 1. 计算环境干扰 *)
dist = disturbance[t];
(* 2. LADRC 控制 *)
(* TODO: 把 target 填入函数调用的第三个参数 *)
{ctrl, u} = stepLADRC[ctrl, state["y"], target];
(* 3. 物理演化: a = b*u + f *)
acc = b_true * u + dist;
state["y"] += state["vy"] * dt;
state["vy"] += acc * dt;
(* 4. 记录: {时间, 真实高度, 估算干扰 z3} *)
Sow[{t, state["y"], ctrl["z3"]}];
, {i, 1, steps}
];
][[2, 1]];
(* === 4. 画图验证 === *)
dataT = simulationResult[[All, 1]];
dataY = simulationResult[[All, 2]];
dataZ3 = simulationResult[[All, 3]];
(* 图1: 高度变化 *)
p1 = ListLinePlot[Transpose[{dataT, dataY}],
PlotStyle -> {Blue, Thickness[0.005]},
PlotLabel -> "Elevator Position (Target: 20m)",
Frame -> True, GridLines -> Automatic, ImageSize -> Medium];
(* 图2: ESO估算的干扰 (见证奇迹的时刻) *)
p2 = ListLinePlot[Transpose[{dataT, dataZ3}],
PlotStyle -> {Red, Thickness[0.005]},
PlotLabel -> "What does ESO think the disturbance is?",
Frame -> True, GridLines -> {{}, {-9.8}}, (* 我加了一条参考线 *)
FrameLabel -> {"Time", "Estimated z3"},
ImageSize -> Medium];
Column[{p1, p2}]
🚀 思考题 (运行后再看)
当你运行成功后,观察图2(红色的线):
- 最终稳定在什么数值附近?
- 为什么是这个数值?(提示:重力加速度是多少?)
- 如果把 改成 200kg,但不用告诉控制器,你觉得 会变吗?系统还能稳在 20米吗?
请将补全后的代码发给我,或者直接告诉我你的实验结果!